♦3 veces la capacidad de sobrecarga, par de engranaje inferior, velocidad de respuesta
♦Ajuste automático de ganancia en tiempo real
♦ Admite CANopen y EthercAT para realizar un control de sincronización de respuesta alta de múltiples ejes
♦Función STO para cumplir con los requisitos de protección ambiental.
♦Nivel de carcasa del motor con IP65/67, cumple con los requisitos a prueba de agua y polvo.
Artículo No :
SCH-DA2Orden (MOQ) :
5Pago :
T/TOrigen del producto :
ChinaServocontrolador universal de alto rendimiento SCH-DA2
La serie DA2 es un nuevo servosistema de uso general (motor y variador) de alto rendimiento, que puede usarse ampliamente en una gran industria, como robots de juntas de máquinas de marcado láser, manos mecánicas lineales, maquinaria de madera, maquinaria de vidrio, maquinaria de moldeo por inyección, equipos de soldadura y corte. , equipos cerámicos, equipos textiles, equipos de prueba, equipos de cables, equipos de baterías de litio, equipos de fabricación electrónica, fresadoras, rectificadoras, tornos CNc, líneas de producción de alimentos, líneas de producción de envases, máquinas de grabado y fresado, máquinas de grabado, máquinas de alta iluminación, Máquina alrededor de la línea, máquina de tejer por urdimbre, máquina etiquetadora, máquinas de chapa, etc.
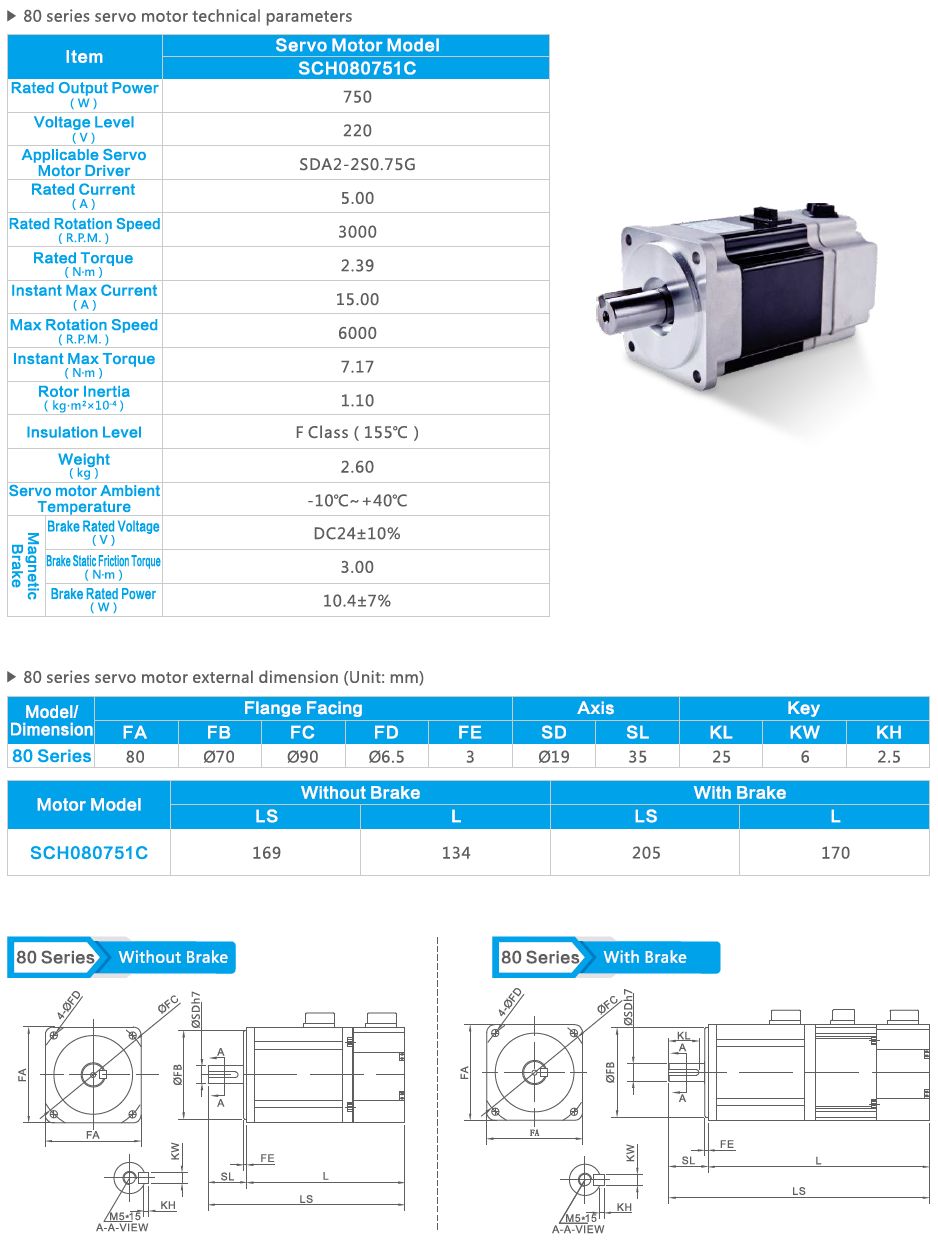
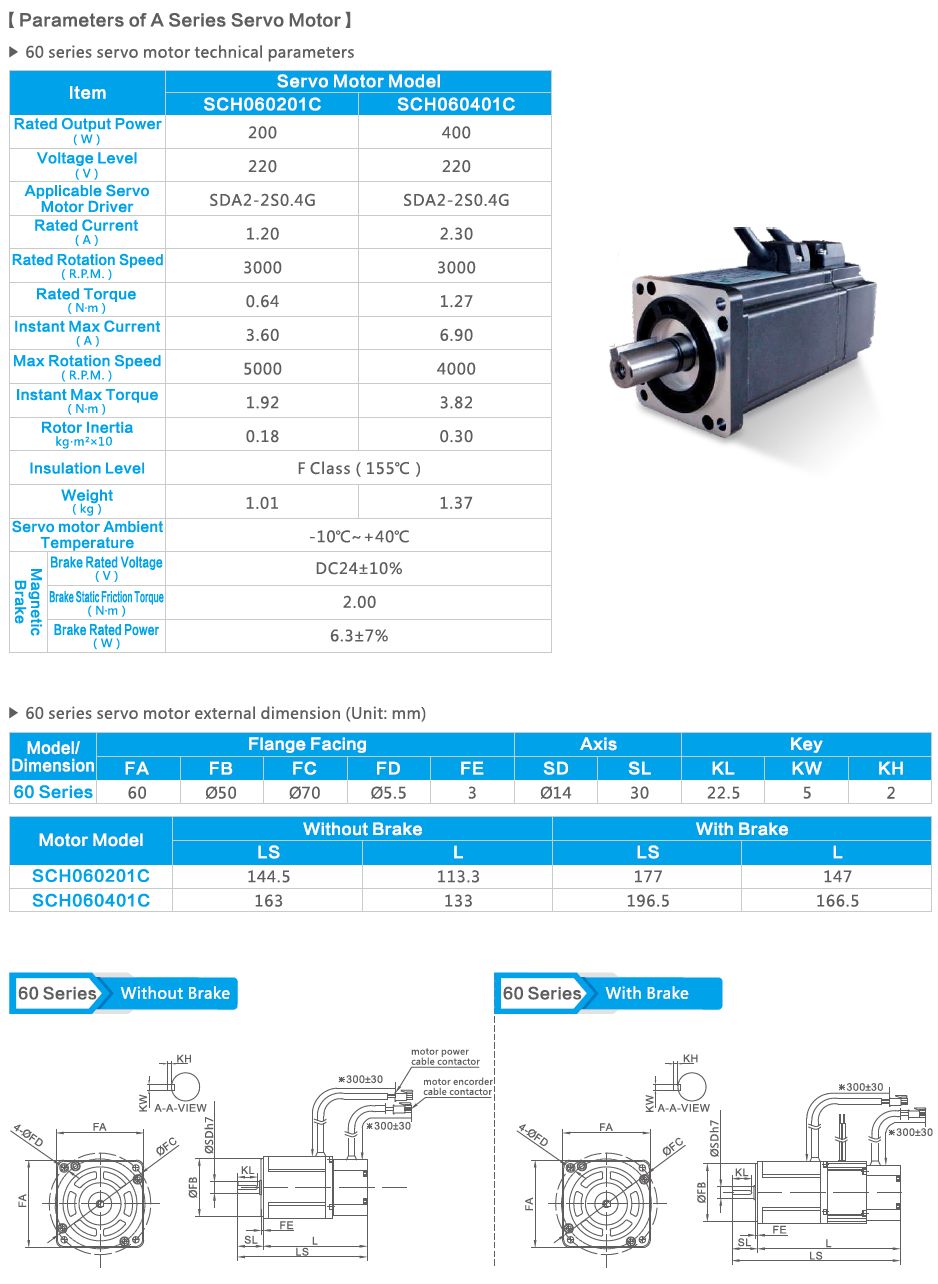
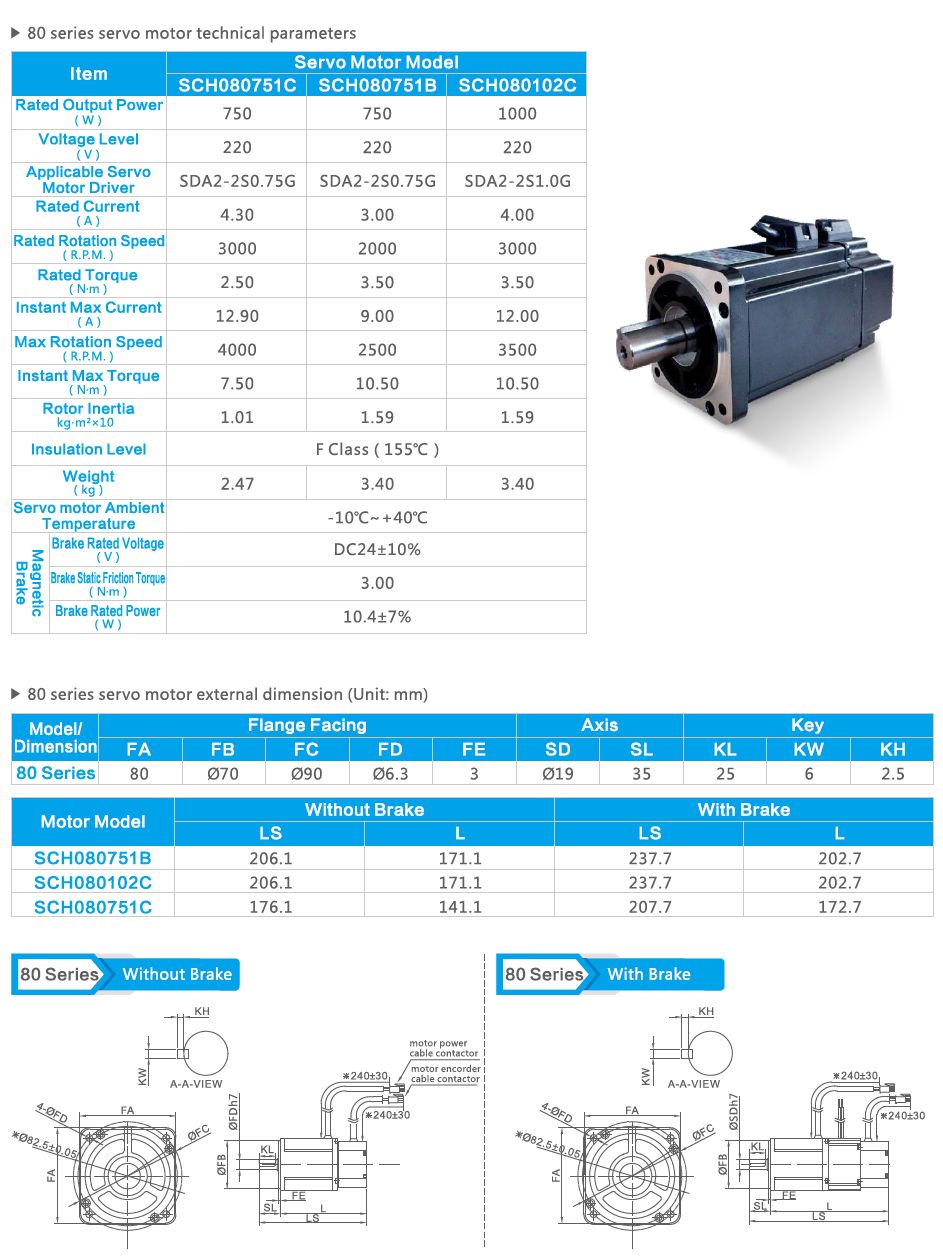
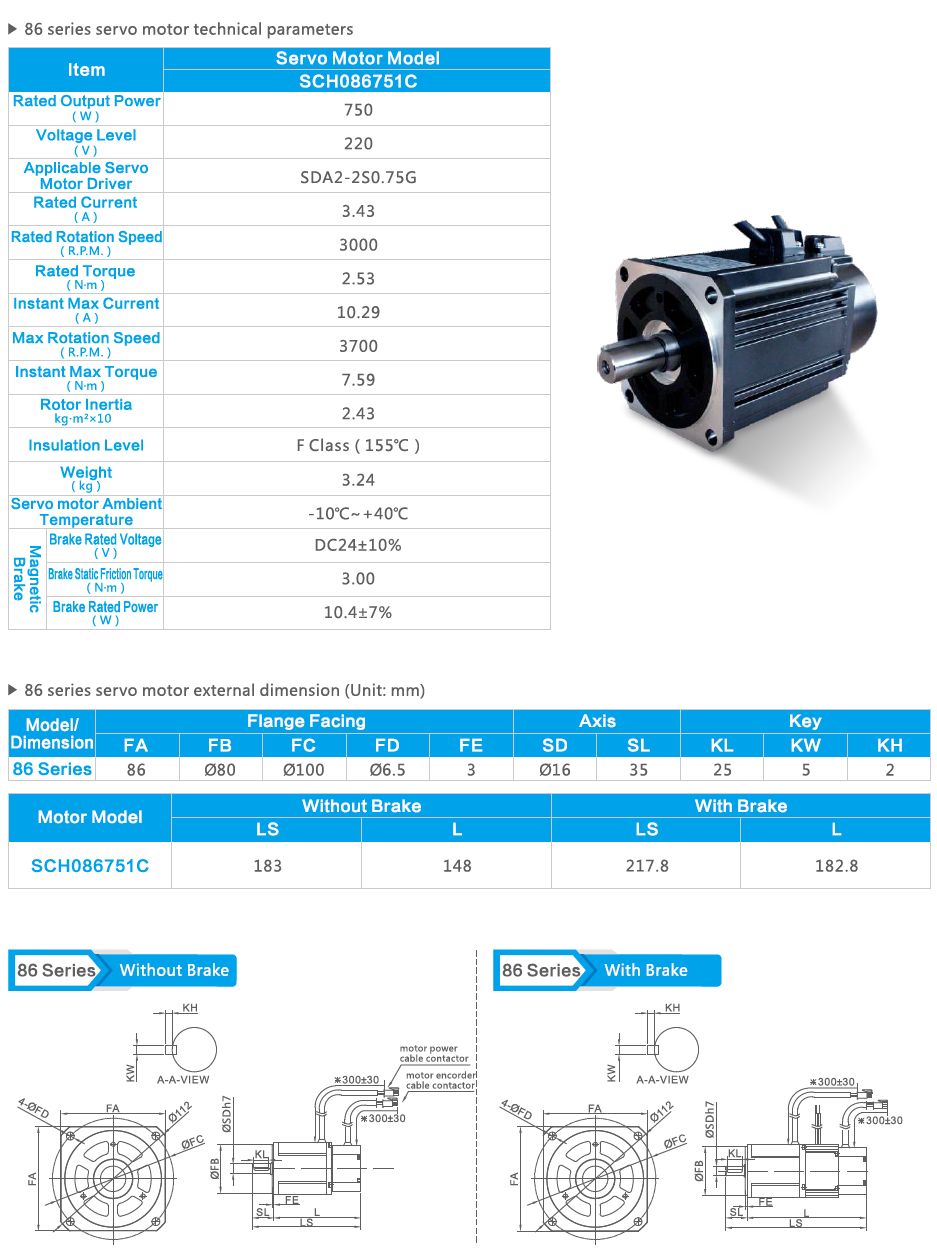
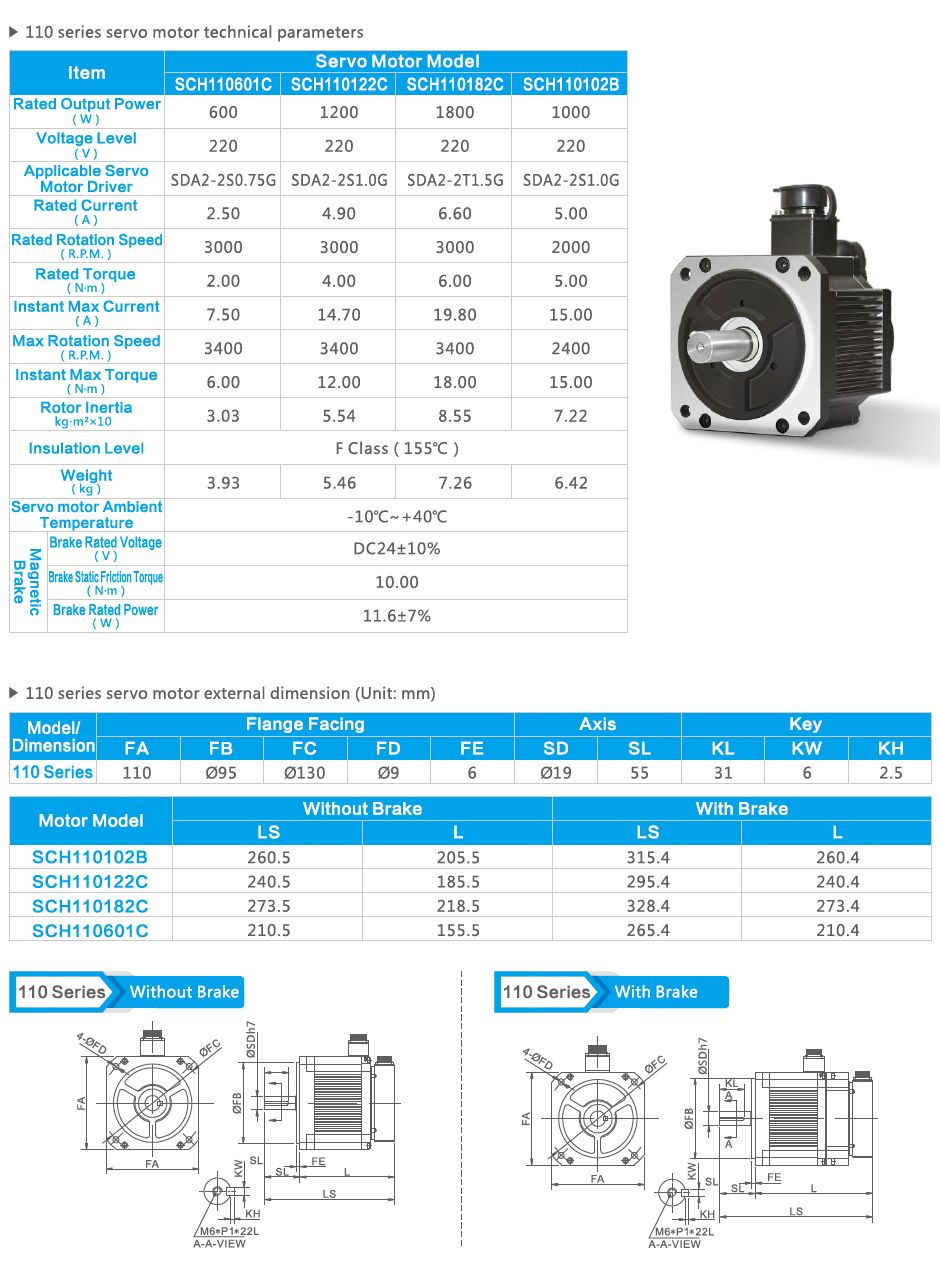
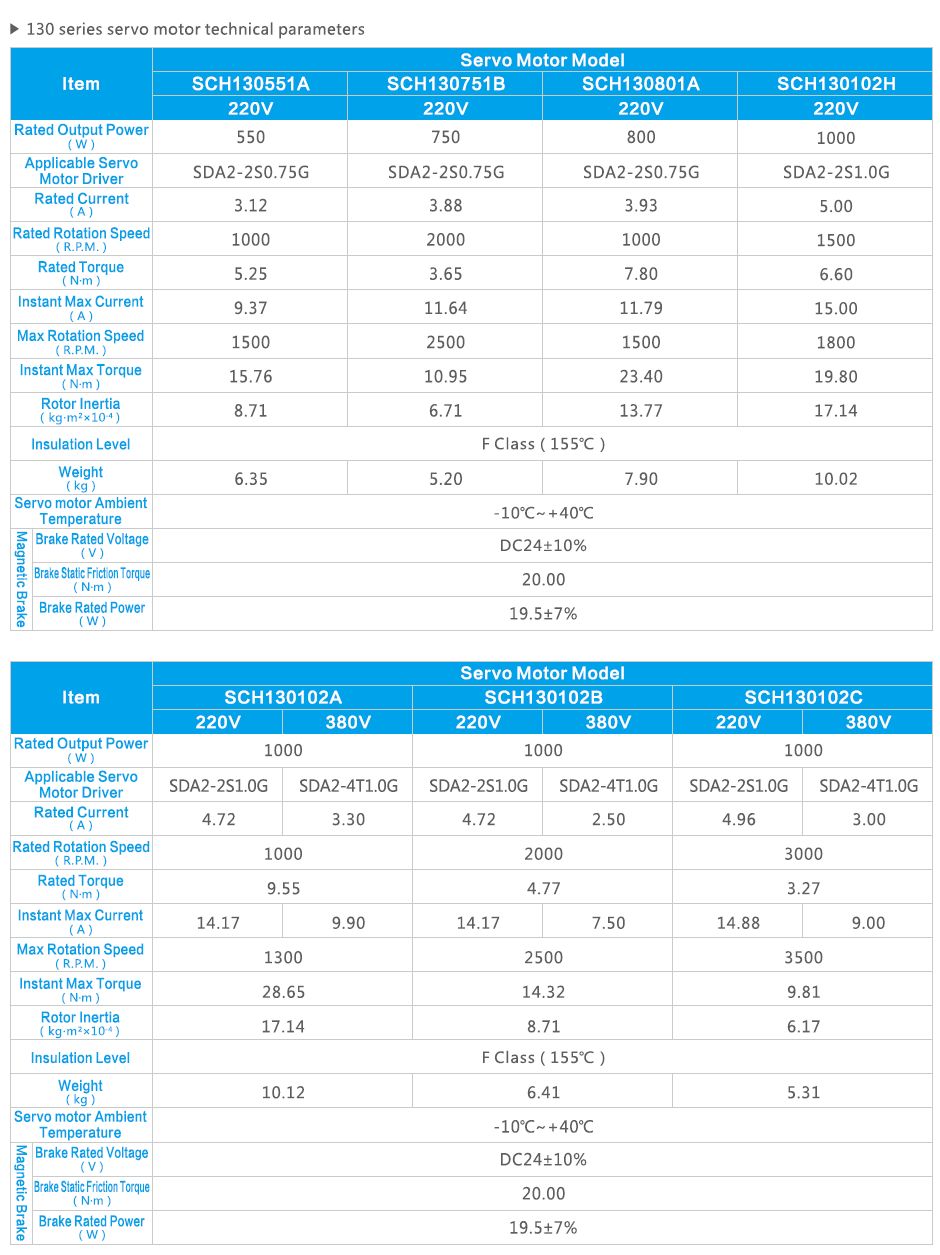
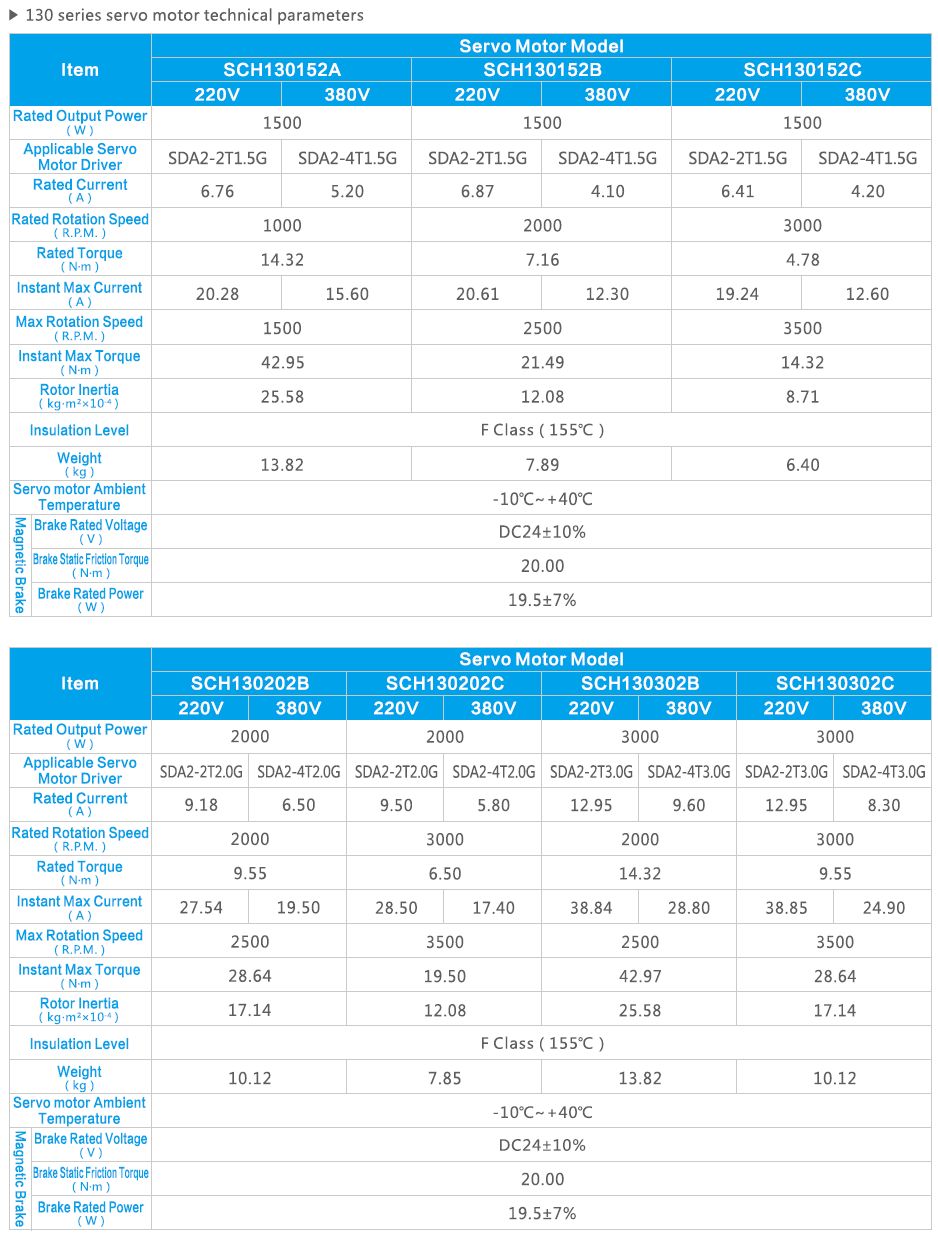
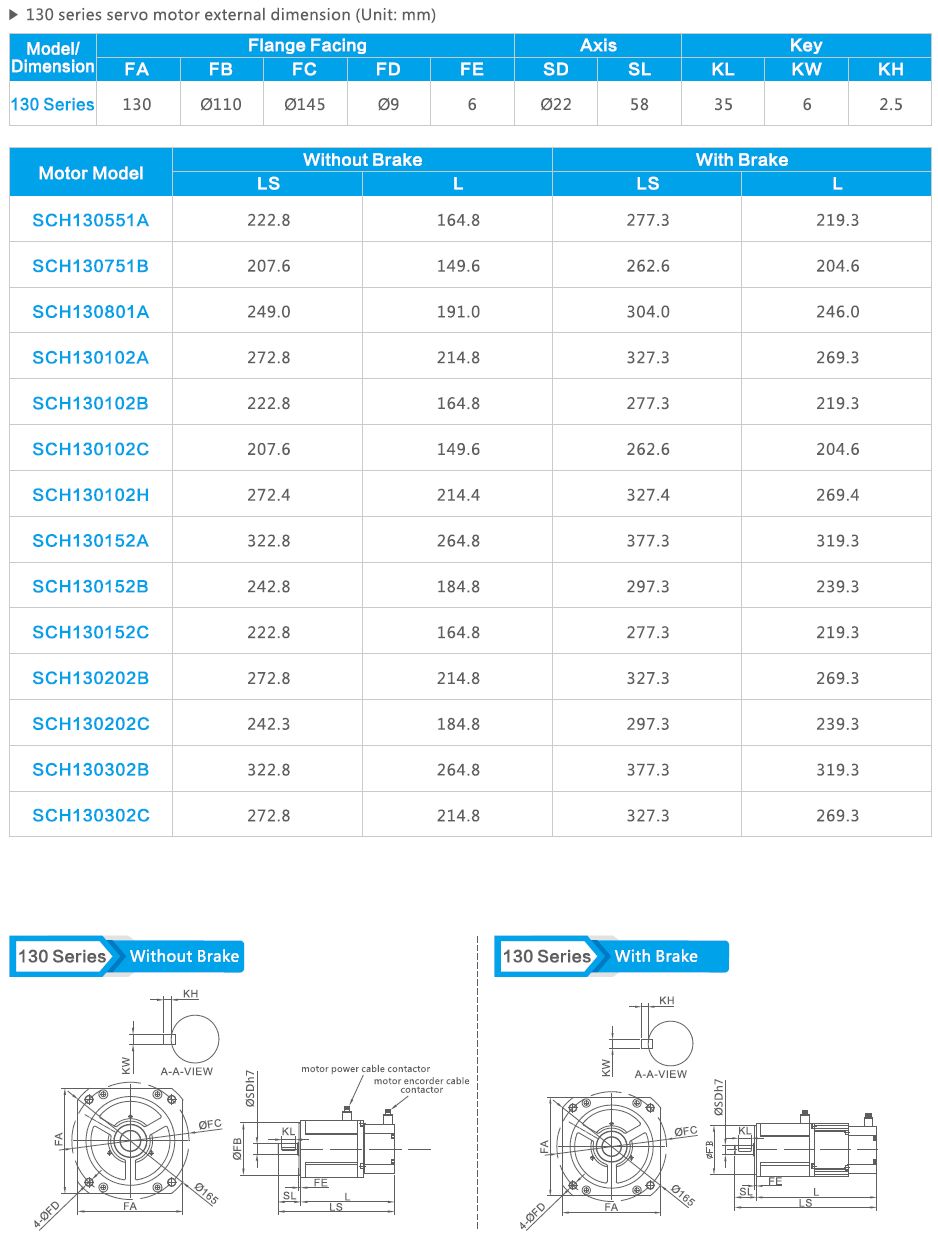
Especificación técnica
| Artículo | Especificaciones | |
| Potencia de entrada | Monofásico/trifásico 220V, trifásico 380V | |
| Rango de variación de voltaje (-15%~+10%)50/60Hz | ||
| Método de enfriamiento | Refrigeración por ventilador | |
| Modo de control del circuito principal | Modo de onda sinusoidal IGBT PWM | |
| Comentario | 17 bits (estándar)/20 bits | |
| Modo de control | ①Control de posición ②Control de velocidad ③Control de par ④Interruptor de modo de posición/velocidad ⑤Interruptor de modo de posición/par ⑥Interruptor de modo de velocidad/par ⑦Modo de operación de posicionamiento | |
| Posición Control | Entrada máxima frecuencia de pulso | Pulso de baja velocidad: entrada máxima 500 kHz (entrada de accionamiento de línea), Entrada máxima 200 kHz (entrada de colector abierto) |
| Pulso de alta velocidad: entrada máxima 4MHz (entrada de unidad de línea) | ||
| Pulso de comando modo de entrada | ①Pulso de comando/señal de comando ②Pulso de rotación hacia adelante y hacia atrás pulso giratorio ③pulso ortogonal de fase A/B | |
| control de mando modo | ①Control de entrada de pulso de comando externo ②Control de datos de posición internos ③Control de comando de comunicación | |
| equipo electrónico | Engranaje electrónico N/M veces (N:1~4194304)/(M:1~4194304) | |
| Limitación de par | Control de parámetros (la rotación hacia adelante y la rotación hacia atrás se pueden configurar respectivamente)/ Control de par analógico externo | |
| Velocidad Control | Entrada de comando analógico | VREF DCO~±10V |
| Tasa de variación de velocidad | ±1r/min o menos (rango de carga 0~100%) | |
| Rango de velocidad | 1:5000 | |
| Aceleración y tiempo de desaceleración configuración | El tiempo de aceleración y el tiempo de desaceleración se pueden configurar respectivamente y tienen dos grupos y puede acelerar y desacelerar con la curva S | |
| Modo de control de velocidad | Entrada analógica externa/Configuración de velocidad interna | |
| Limitación de par | Control de parámetros (la rotación hacia adelante y la rotación hacia atrás se pueden configurar respectivamente)/ Control de par analógico externo | |
| Esfuerzo de torsión Control | Comando analógico aporte | TREF DCO~±10V |
| Limitación de par | Control de parámetros/Limitación de velocidad analógica externa | |
| Digital Aporte/ Producción | Aporte | Entrada de líneas EI1 ~ EI88, la función se puede configurar libremente según el parámetro |
| Producción | Salidas de pulso del codificador por división de frecuencia, salida de fase A/B/Z por accionamiento de línea y colector abierto (Total 6 líneas) | |
| Salida de líneas EOUT1 ~ EOUT55, la función se puede configurar libremente de acuerdo con el parámetro | ||
| Monitor | Velocidad de retroalimentación, velocidad de referencia, par de referencia, corriente del motor, retroalimentación de corriente. Ubicación nt, diferencia de ubicación, frecuencia de pulso de referencia, acumulación de pulso de retroalimentación Ación, acumulación de pulso de referencia, voltaje de entrada VREF, voltaje de entrada TREF, voltaje de entrada Señal de terminal, señal de terminal de salida, etc. | |
| Protección (visualización de alarma) | Sobrecorriente (oc1, oc2), exceso de velocidad (oS), sobretensión (Hv), error de memoria (dE), enc- Error de orden (Ec), sobrecarga (oL1, oL2), bajo voltaje del circuito principal (Lu), repetición EI (ctE) Desbordamiento de desviación (oF), sobrecalentamiento del servomotor (AH), etc. | |
| Aplicación- ción Reinar- mento | Ubicación del sitio | En interiores (evitar la luz solar directa), sin gases corrosivos (evitar humo, metano |
| Ambiente Temperatura | 0~50℃(Cuando la temperatura ambiente es superior a la requerida introduzca la circulación de aire) | |
| Temperatura de almacenamiento | -20 ℃ ~ 75 ℃ | |
| Humedad relativa | HR 90 % inferior (sin condensación) | |
| Altitud | Menos de 1000 m | |
| Presión atmosférica | 86~106kPa | |
Vvibración | ≤0,5G | |
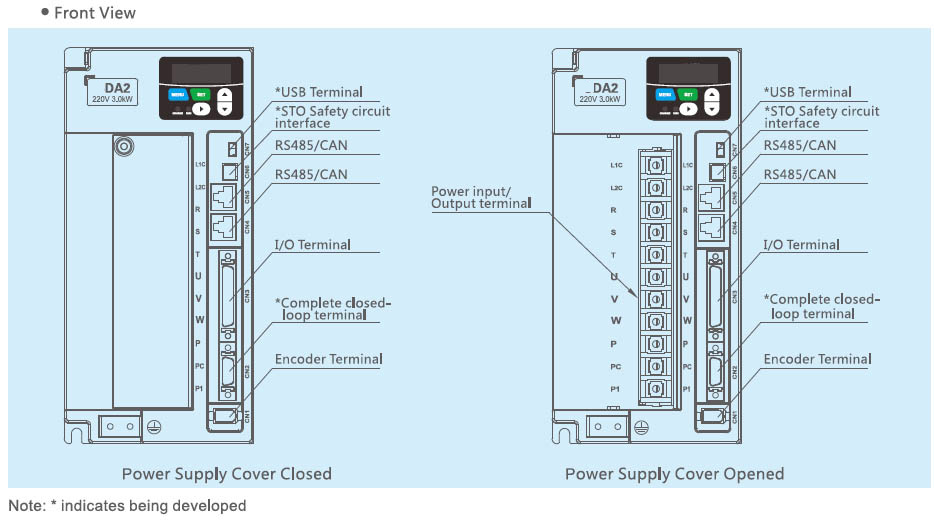
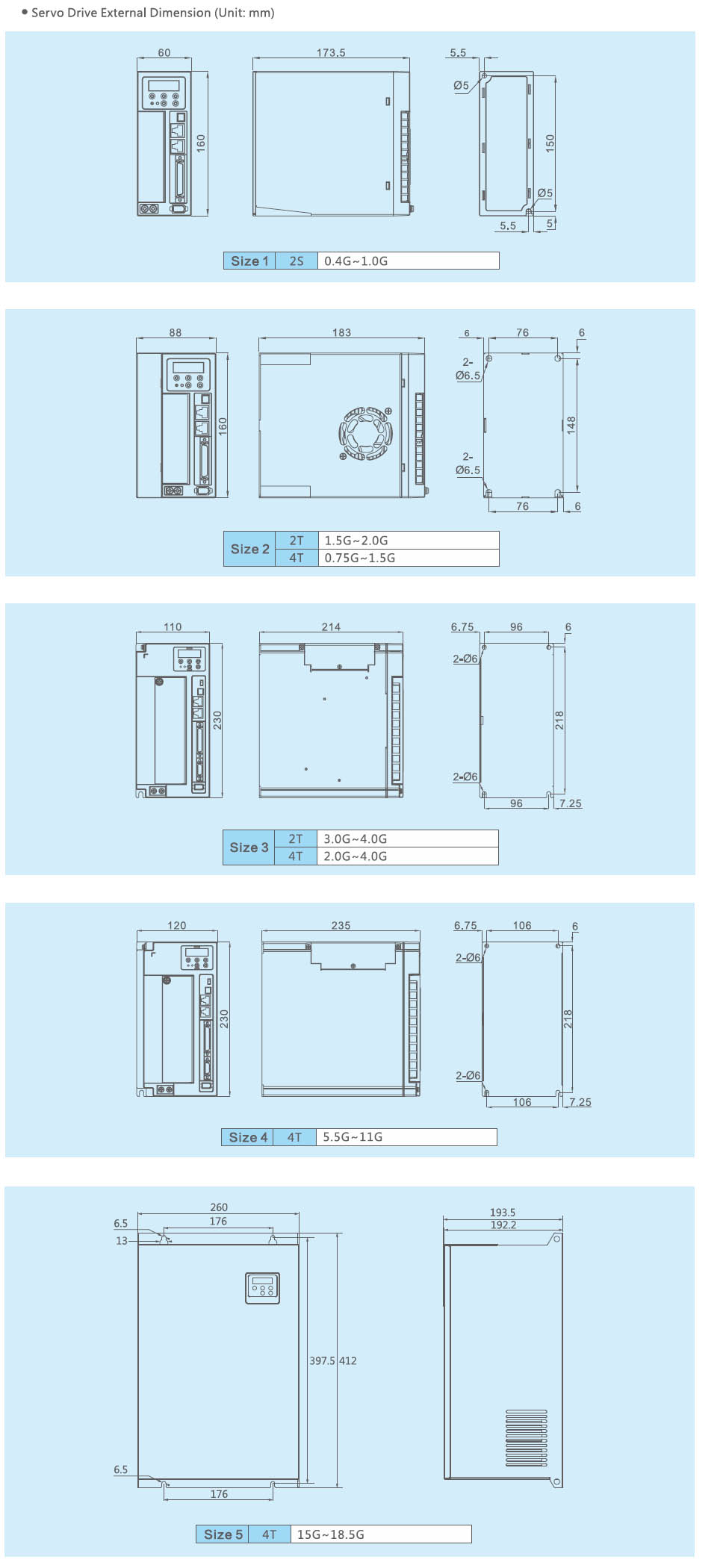
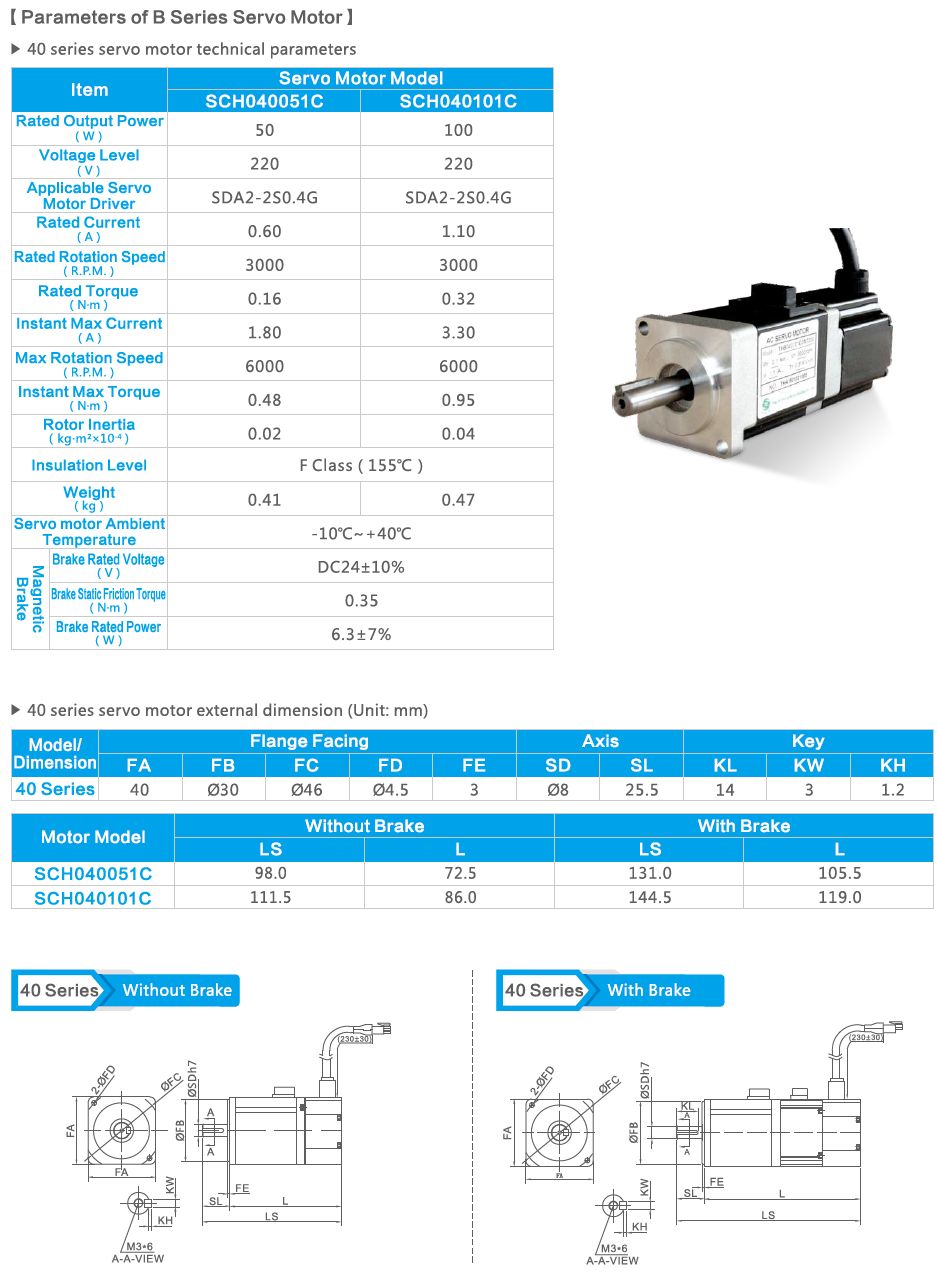
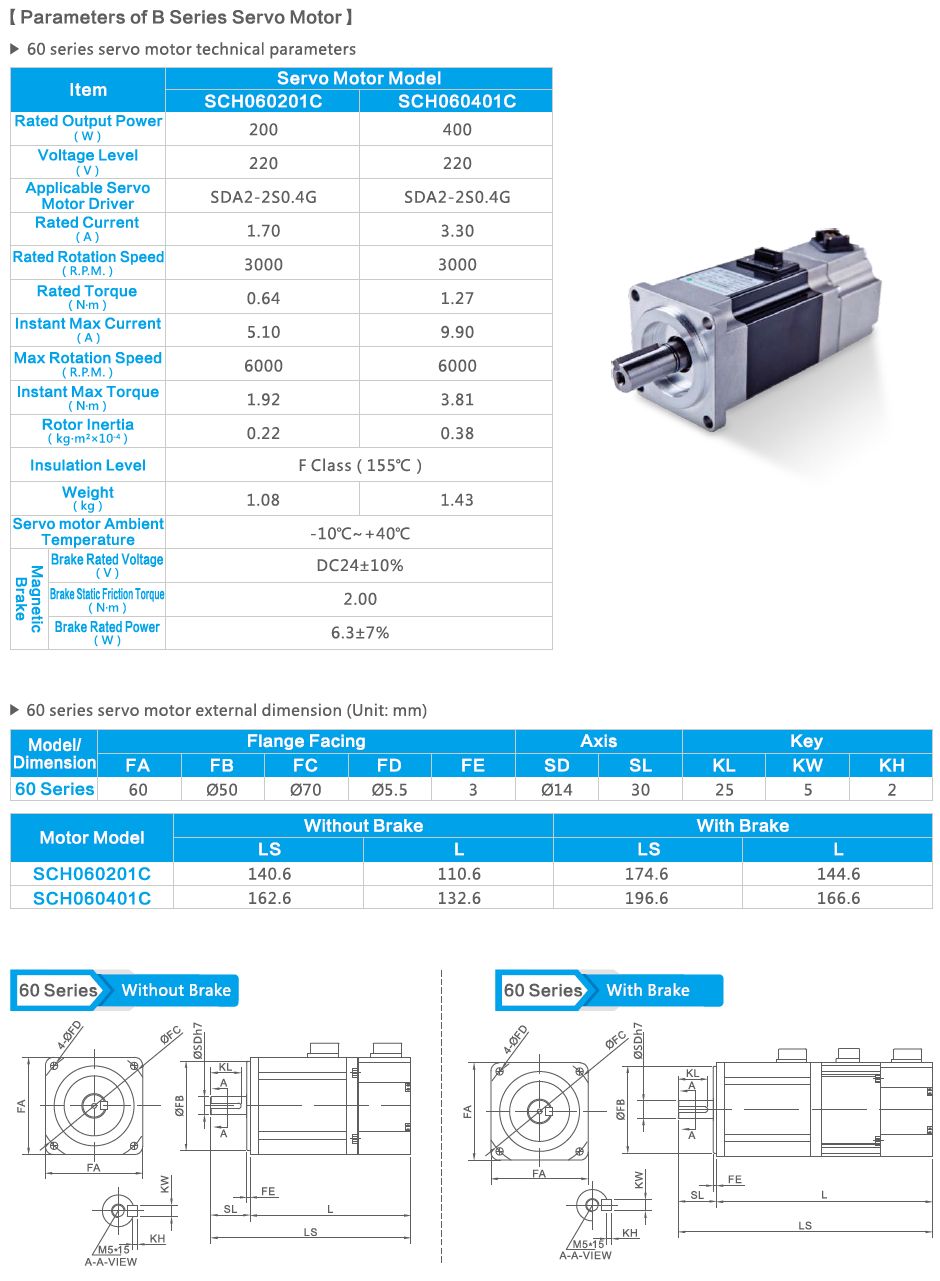
Caracteristicas de producto
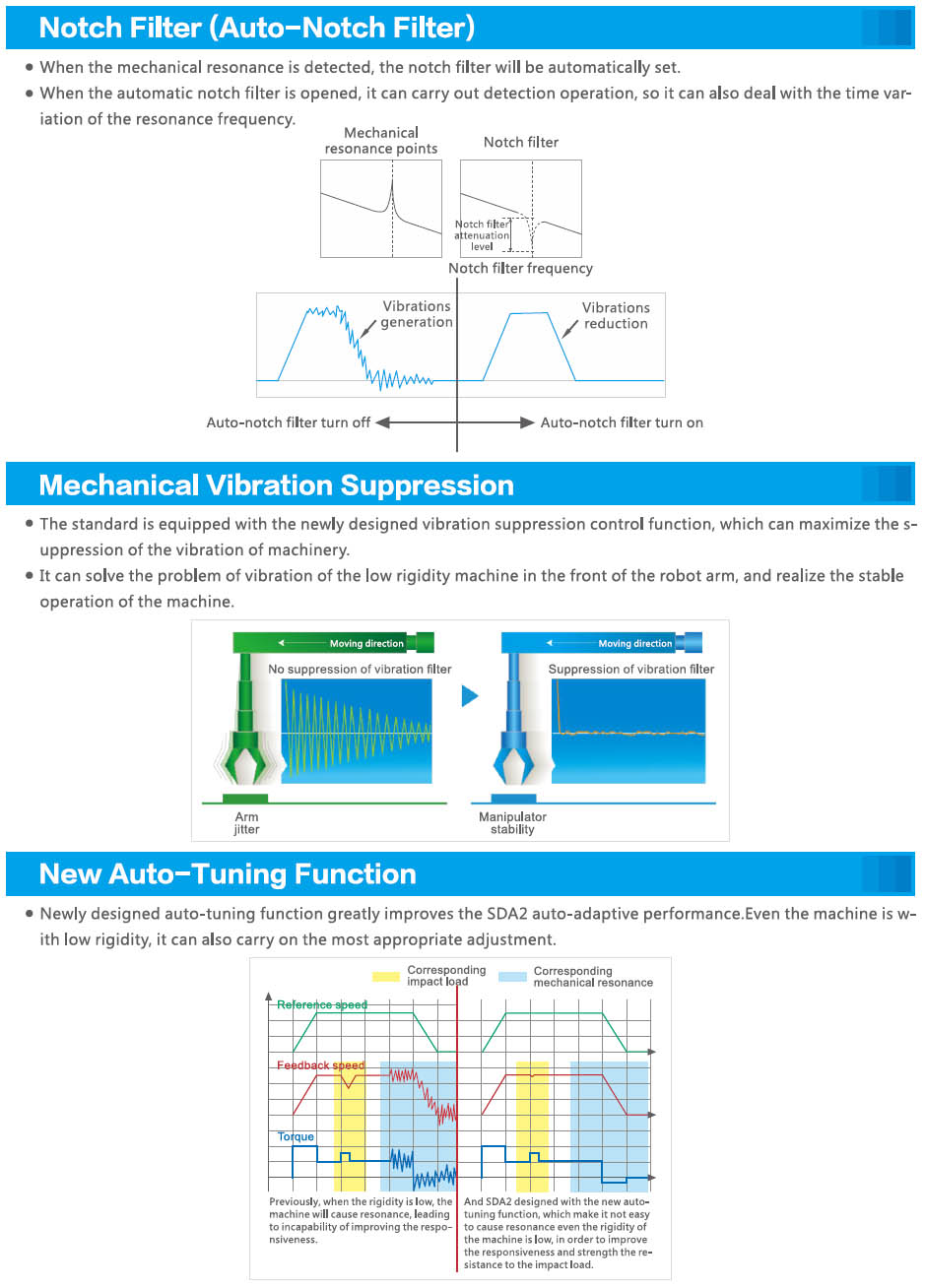
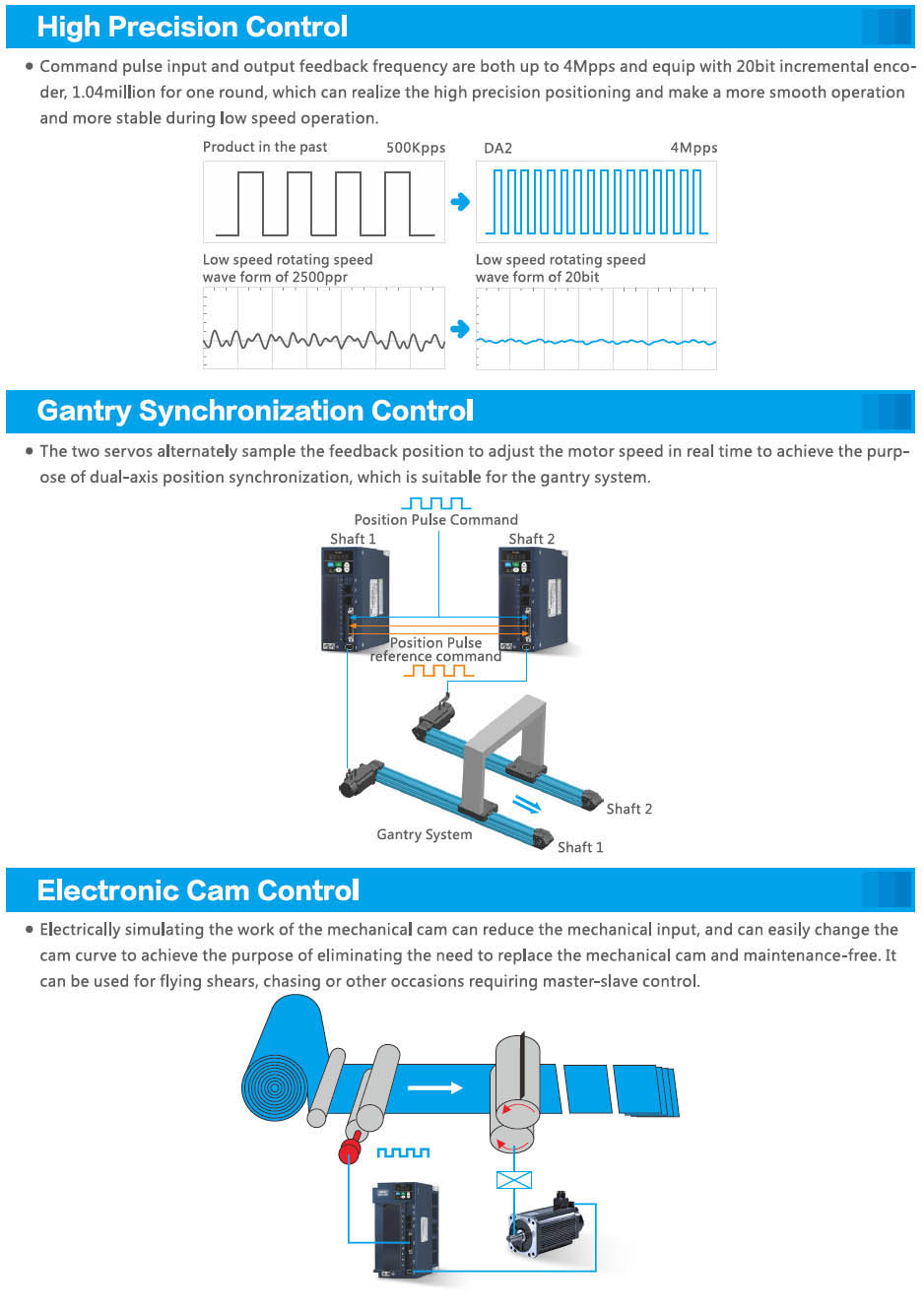
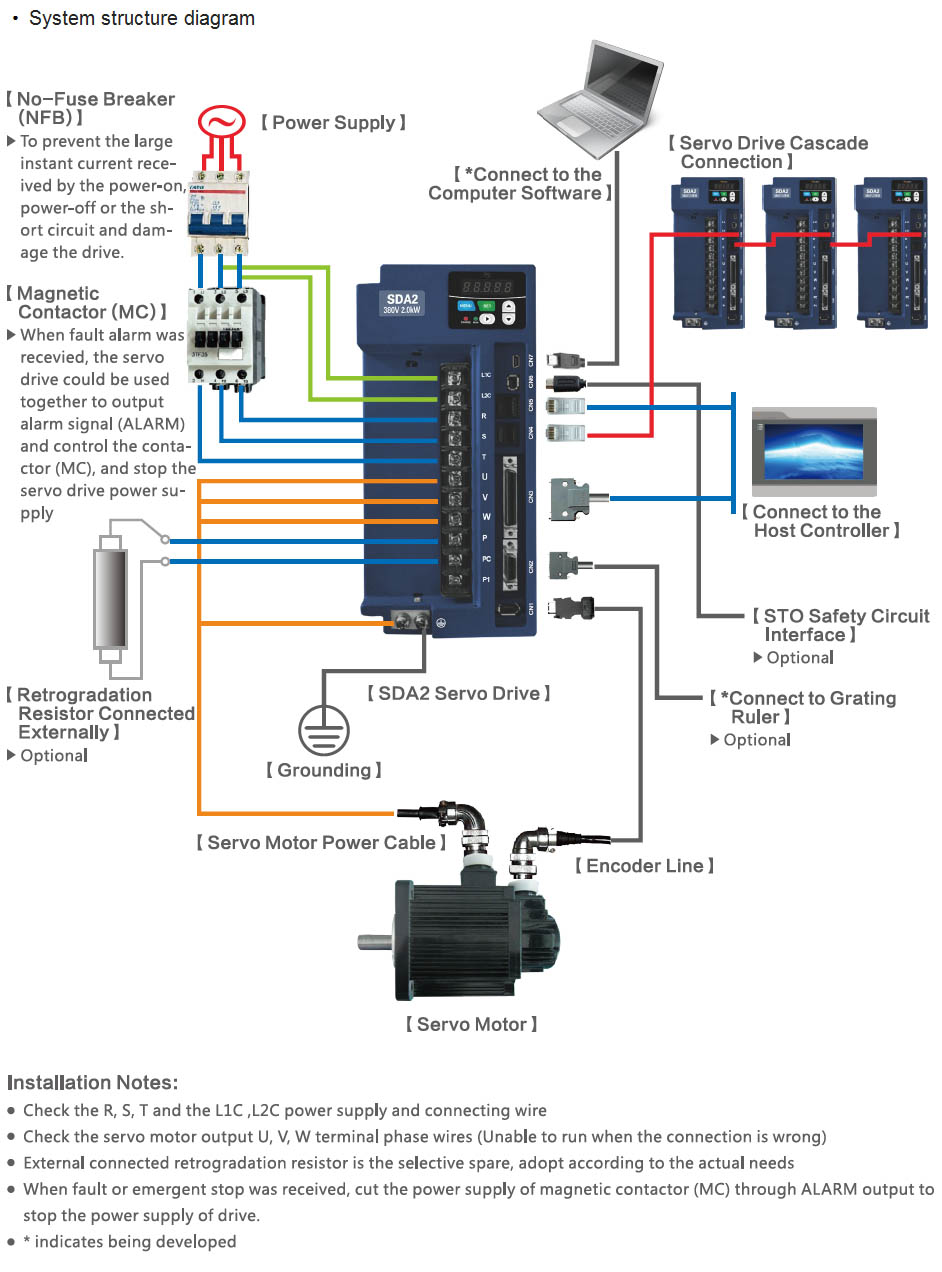
Diagrama de cableado del producto
Accesorios Opcionales
Preguntas más frecuentes
¿Se puede producir según las muestras o los dibujos?
Sí, podemos producir según sus muestras o dibujos técnicos. Podemos construir los moldes y accesorios.
¿Cuál es el plazo de entrega?
Para los modelos estándar, el plazo de entrega es de aproximadamente 3 a 5 días después de confirmado el pedido y recibido el pago.
Para pedidos OEM, la entrega es aproximadamente de 2 a 3 semanas después de la confirmación de los datos y la recepción del pago.
¿Cómo solucionar los problemas de calidad postventa?
Tome fotografías o vídeos de los problemas y envíenoslos.
Le ofreceremos una solución satisfactoria dentro de las 24 horas posteriores a la confirmación de los problemas.
ETIQUETAS CALIENTES :




Teléfono : +86 -13459014809
Correo electrónico : sales@schwahrtechnology.com
No. 6788-1, Binhai West Avenue, Xike Town, Tong'an District, Xiamen City (Yincheng Zhigu)
Derechos de autor © 2024 tecnología co de schwahr. limitado.