♦La eficiencia del procesamiento de doble núcleo es mayor, el motor alto funciona suavemente, la vibración al detenerse es menor y la respuesta es más rápida
♦ Visualización de menú simple y fácil de entender
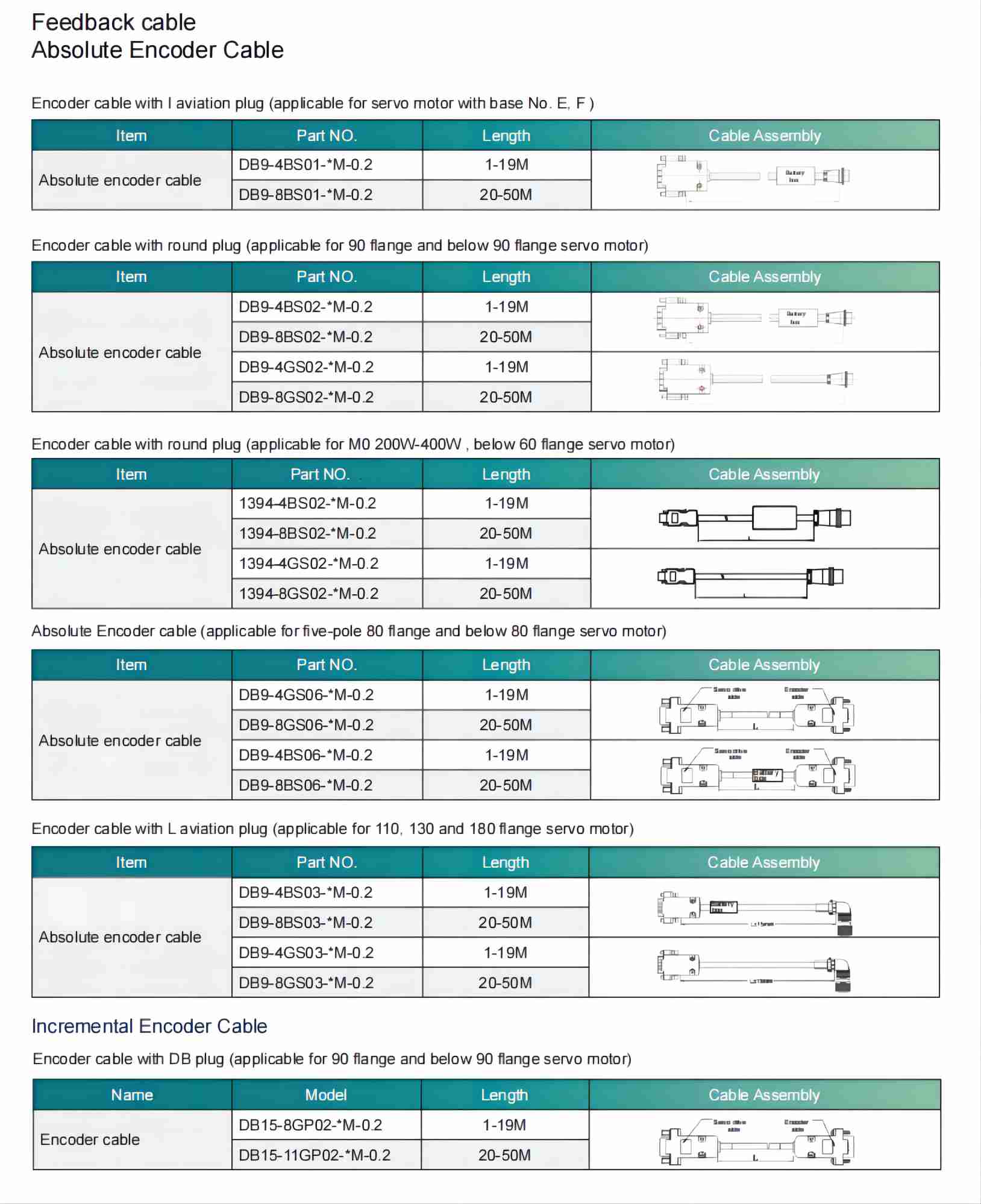
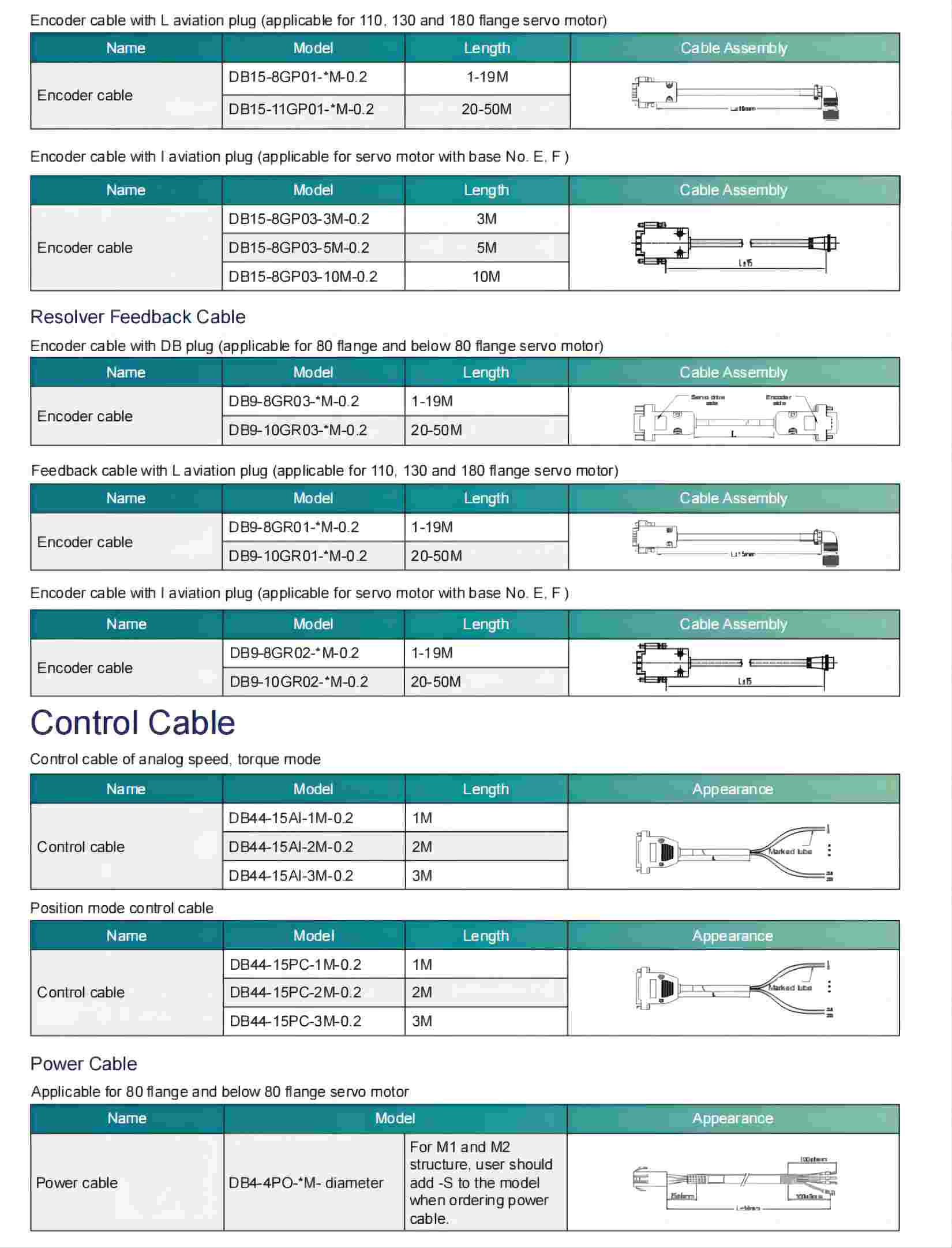
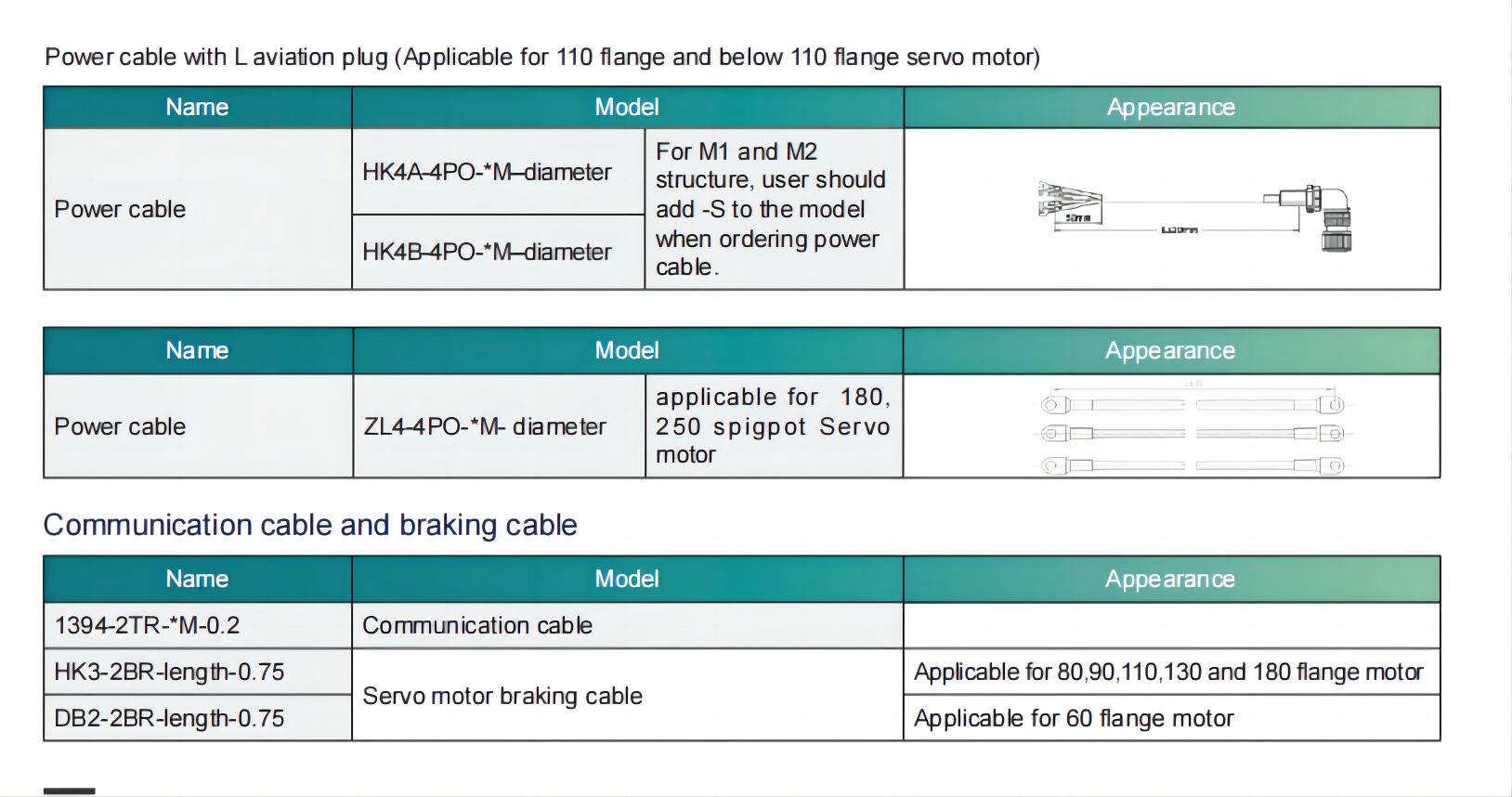
♦ El enchufe de la serie DB para cableado conveniente, operación simple y soldadura sencilla
♦Admite control de bus CANopen/EtherCAT, satisface las necesidades de equipos de alta gama.
♦SD20 admite control de circuito cerrado completo y sincronización de pórtico, y el conductor puede adaptarse a una gama más amplia de lugares.
Artículo No :
SCH-D20-GOrden (MOQ) :
5Pago :
T/TOrigen del producto :
ChinaServo universal SCH-D20-G
Los servodrives de la serie D20-G son un variador de alto rendimiento especialmente adecuado para uso general. Tiene una respuesta de frecuencia de 3,0 kHz, que podría cumplir con una amplia gama de requisitos del cliente. Las opciones de retroalimentación son codificador incremental, codificador absoluto y resolución.
La rica funcionalidad incluye bucle de cierre completo, control de múltiples posiciones, conmutación de ganancia, corte móvil de longitud fija, etc.
El PLC incorporado está abierto para que el cliente realice una programación sencilla.
Ampliamente utilizado en robots, máquinas herramienta CNC, textiles, embalajes y otras industrias.
Especificación técnica
| Artículo | Contenido | |
| Potencia de entrada | Serie S2/T2 | 220VAC-15~+10%50/60Hz |
| Serie T3 | 380~440VCA-15~+10%50/60Hz | |
| Modo de control | Pt: Modo de pulso de posición Pr: Modo de posición de registro interno | |
| Sz: modo de velocidad analógica Sr: modo de velocidad de registro interno | ||
| Tz: modo de par analógico Tr: modo de par de registro interno | ||
| Consumo de energía frenado | Resistencia de freno incorporada o externa (la externa es opcional) | |
| El modelo M1 no tiene resistencia de frenado incorporada; | ||
| Los conductores de 7,5 KW y superiores no tienen resistencia de frenado incorporada | ||
| El resto tiene resistencias de freno incorporadas. | ||
| Control características | método de control | Motor síncrono de imanes permanentes; |
| frecuencia de respuesta de velocidad | Servo síncrono de imán permanente: 1,2 KHz; | |
| volatilidad de la velocidad | ±0,01% (carga 0~100%) | |
| fluctuación de velocidad | Motor síncrono de imán permanente: ±0,01% (VC, carga 0~100%): | |
| relación de velocidad | 1:10000 | |
| Frecuencia de pulso de entrada | 1、500 KHz (diferencial): 200 KHz (colector abierto): | |
| 2、La frecuencia aceptable para un circuito de impulsos de alta velocidad es 4Mz (tipo diferencial); | ||
| Señal de entrada | Entrada de control | Activación de servo, reinicio de alarma, borrado de pulso de comando, desactivación de pulso de comando, desactivación de giro hacia adelante, desactivación de marcha atrás, límite de par positivo, límite de par inverso, selección de velocidad interna, disparador de posición interna, disparador de búsqueda de origen/mecánico, abrazadera de velocidad cero, etc. |
| Codificador | 1.Codificador de valor absoluto; | |
| 2.Codificador incremental; | ||
| 3 transformador rotativo; | ||
| 4.BiSS-C; | ||
| 5.Tejido magnético | ||
| 6.Hipercara; | ||
| Señal de salida | Salida de control | Servo listo, alarma de servo, posición llegada, velocidad llegada, control de rotación de salida de bloqueo electromagnético, límite de velocidad medio, origen encontrado, límite de par medio |
| Señal del codificador frecuencia salida de división | Tres métodos de salida: 1, salida de circuito abierto del colector de fase Z del codificador; 2, codificador A, salida diferencial de señal de división de frecuencia de fase B (no aislada) división de frecuencia arbitraria; fase Z sin salida de frecuencia; 3, función de expansión del tiempo de pulso Z; | |
| Control de posición | Modo de entrada | Pulso ortogonal bifásico, pulso directo+pulso inverso, pulso+dirección, registro interno |
| Relación de transmisión electrónica | 1、0,01 | |
| 2, admite dos juegos de equipos electrónicos, los usuarios pueden elegir o cambiar según las necesidades reales | ||
| Control de velocidad analógico | -10V~Entrada de señal de velocidad analógica de +10 V, puede cambiar el rango de configuración;a través del código de función; la fuente de la instrucción es opcional; | |
| Control de par analógico | -Entrada de señal de par analógica de 10V ~ + 10V, puede cambiar el rango de configuración;a través del código de función; la fuente de la instrucción es opcional; | |
| Añadir/reducir la velocidad | Configuración de parámetros tiempo de aceleración y desaceleración 1~30000ms (de 0 aceleración a velocidad nominal) | |
| Comunicaciones | Interfaz RS485/RS232, a través de la conexión con PC, configuración y monitoreo de parámetros de servocontrol | |
| Configuración de parámetros | Entrada de teclado | El ajuste de parámetros se puede operar con cuatro teclas y mostrarse a través de un tubo Nixie de 5 dígitos. |
| Computadora superior Ajustes | El software de computadora superior que ejecuta el servo Ori configura el controlador Parámetros a través de la interfaz de comunicación RS485,RS232 | |
| Función de monitoreo | Corriente de salida, voltaje del bus, velocidad del motor, pulso de retroalimentación del motor, revolución de retroalimentación del motor, pulso dado, error de pulso dado, velocidad dada, par dado, velocidad analógica, par analógico, eto | |
| Función de protección | Alarma de categoría 1: sobretensión de la fuente de alimentación principal, sobrecorriente, anomalía del codificador, parada de emergencia, desequilibrio de par, etc. Alarma de categoría II: subtensión de alimentación principal, sobrecarga, error de velocidad excesiva, sobrecalentamiento del controlador, pérdida de fase de suministro de energía del circuito principal, instrucciones de control de pulso anormales, anormalidad en el frenado regenerativo, error de control de posición excesivo, alarma de batería de litio, etc. | |
| Inercia de carga aplicable | Menos de 5 veces la inercia del servomotor. | |
Componente de accionamiento
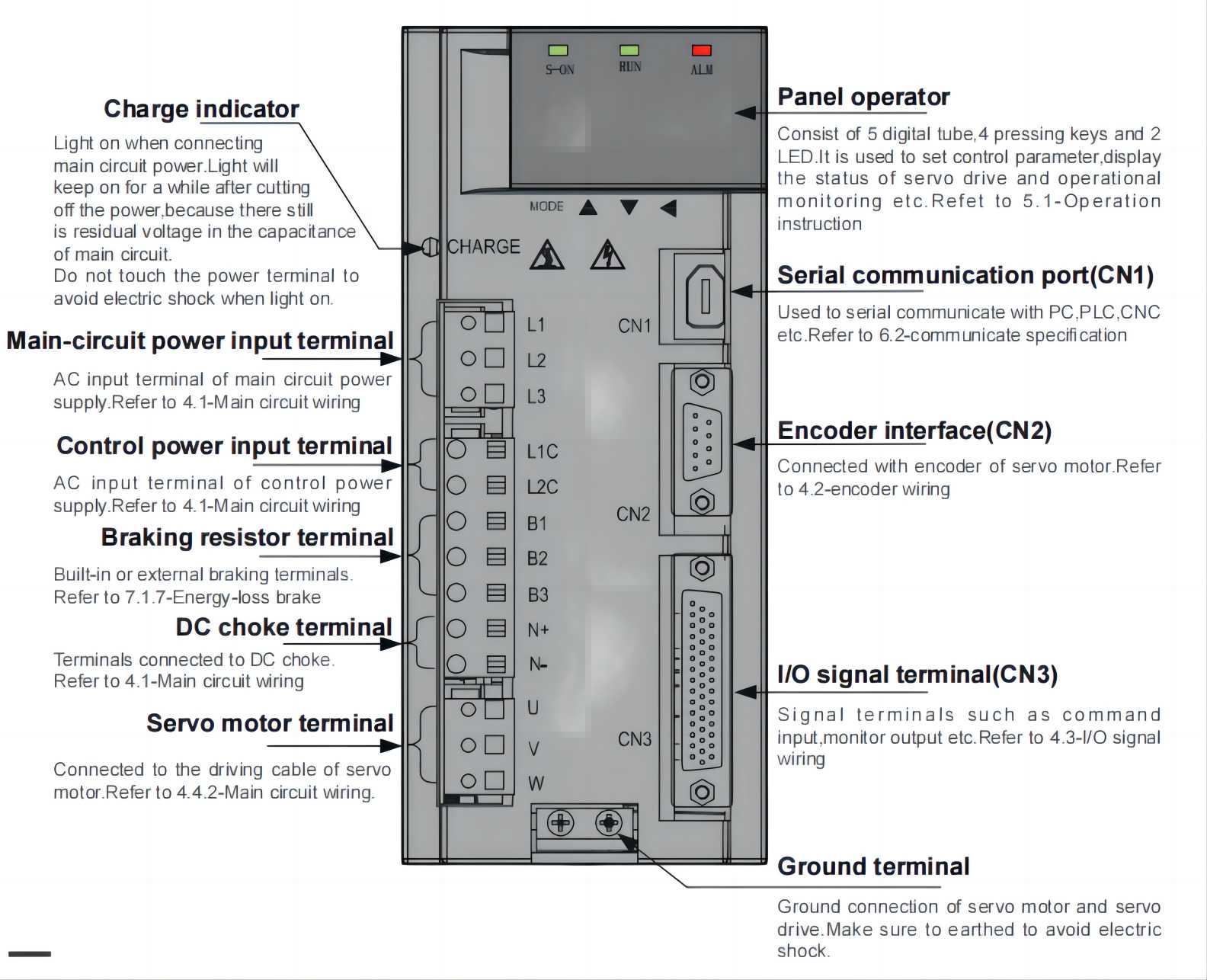
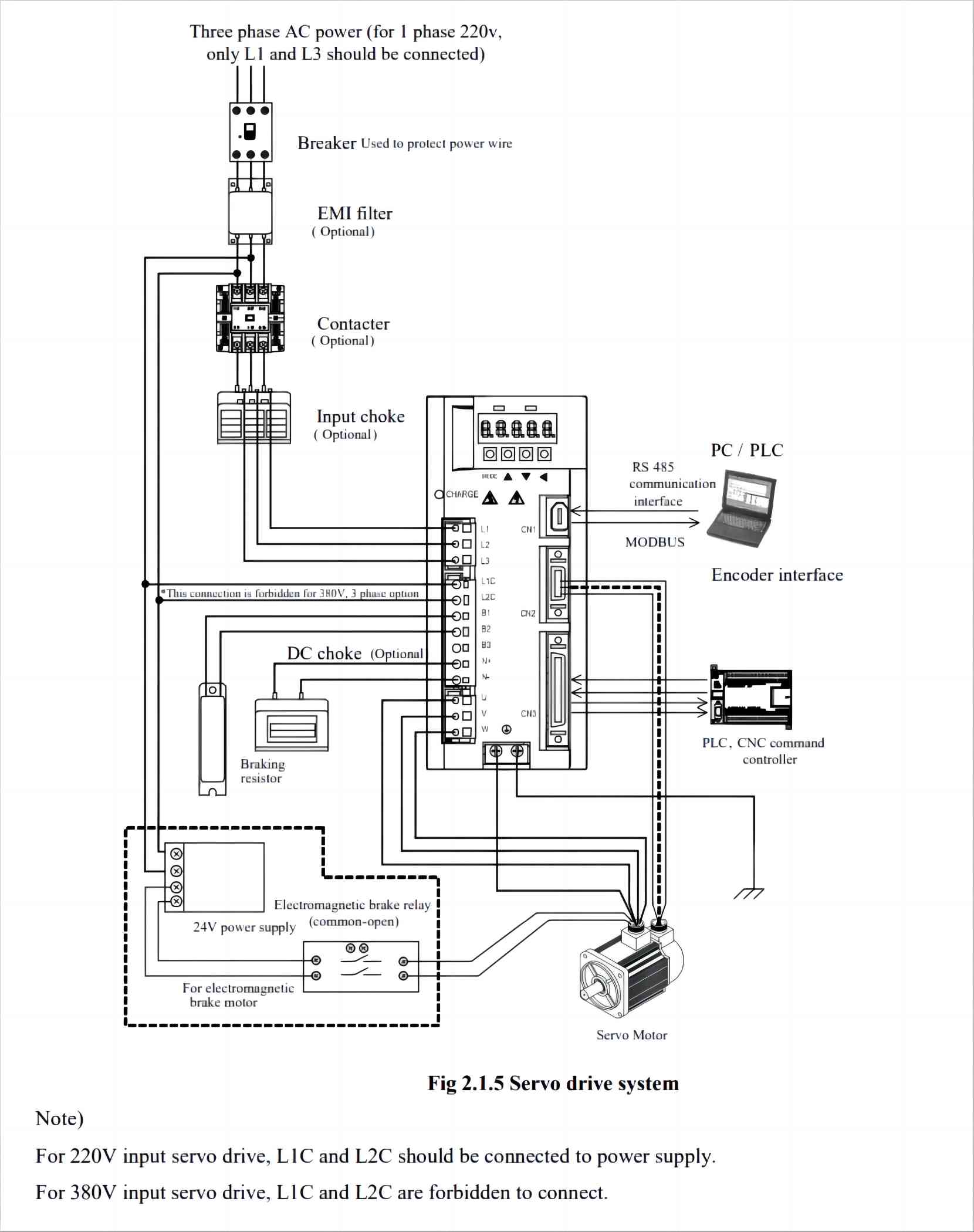
Diagrama de cableado del producto
Preguntas más frecuentes
¿Se puede producir según las muestras o los dibujos?
Sí, podemos producir según sus muestras o dibujos técnicos. Podemos construir los moldes y accesorios.
¿Cuál es el plazo de entrega?
Para los modelos estándar, el plazo de entrega es de aproximadamente 3 a 5 días después de confirmado el pedido y recibido el pago.
Para pedidos OEM, la entrega es aproximadamente de 2 a 3 semanas después de la confirmación de los datos y la recepción del pago.
¿Cómo solucionar los problemas de calidad postventa?
Tome fotografías o vídeos de los problemas y envíenoslos.
Le ofreceremos una solución satisfactoria dentro de las 24 horas posteriores a la confirmación de los problemas.
ETIQUETAS CALIENTES :




Teléfono : +86 -13459014809
Correo electrónico : sales@schwahrtechnology.com
No. 6788-1, Binhai West Avenue, Xike Town, Tong'an District, Xiamen City (Yincheng Zhigu)
Derechos de autor © 2024 tecnología co de schwahr. limitado.