♦El procesador de doble núcleo, el bucle de corriente del hardware, el bucle de posición de 16 KHz y el bucle de velocidad de 16 KHz ayudan a duplicar el rendimiento, en comparación con la última generación.
♦Pasó la prueba EtherCAT CTT, SD20-E tiene mejor compatibilidad para trabajar con diferentes marcas de PLC o controlador de automatización.
♦La transmisión de datos bidireccional puede alcanzar los 100 Mbps. El ciclo de comunicación mínimo es 250uS.
♦Gracias a la función de ajuste automático de ganancia y al control anticipado del modelo, sin importar si hay un comando de ajuste de ganancia o no, ayuda a los clientes a realizar fácilmente el ajuste automático de ganancia y una puesta en servicio sencilla.
Artículo No :
SCH-D20-EOrden (MOQ) :
5Pago :
T/TOrigen del producto :
ChinaServovariadores serie SCH-D20-E
Los servoaccionamientos de la serie SCH-D20-E son unidades de alto rendimiento especialmente adecuadas para uso general. Tiene una respuesta de frecuencia de 3,2 kHz, que podría cumplir con una amplia gama de requisitos del cliente.
Ampliamente utilizado en Máquina herramienta CNC, máquina de embalaje, máquina textil, máquina de madera, etc.
Especificación técnica
| Artículo | Contenido | ||
| Potencia de entrada suministrar | S2/T2 | 220 VCA-10~+10% 50/60Hz | |
| T3 | 380 VCA -10~+10% 50/60Hz | ||
| Modo de control | 1.Modo de control de posición del perfil (PP) 2.Modo de velocidad de perfil (PV) 3.Modo de torsión de perfil (PT) 4.Modo de referencia (HM) 5.Modo de posición síncrona de ciclo (CSP) 6.Modo de velocidad síncrona de ciclo (CSV) 7.Modo de par síncrono de ciclo (CST) | ||
| Freno de pérdida de energía | Resistencia de freno incorporada o externa (alternativa de freno externo) Bastidor M1 y unidades superiores a 7,5 kW: sin resistencia de freno incorporada. Otros modelos: resistencia de freno incorporada | ||
| Control característica | Tipo de control | PMSM motor | |
| Respuesta frecuencia | ServoPMSM: 1,2 KHz | ||
| Velocidad de baudios | ±0,01% (carga 0~100%) | ||
| Fluctuación de velocidad | PMSM: ±0,01% (VC, fluctuación de carga de 0 a 100%) | ||
| Relación de velocidad | 1:10000 | ||
| EtherCAT especificación | Comunicación protocolo | protocolo ethercat | |
| Servicio de soporte | centro de educación (DOP, SDO) | ||
| Sincrónico método | Reloj distribuido CC | ||
| Capa fisica | 100BASE-TX | ||
| Transmisión velocidad | 100 Mbit/s (100Base-TX) | ||
| Modo dúplex | Duplex completo | ||
| Transmisión medios de comunicación | Cable blindado clase CAT5E y superior | ||
| Transmisión distancia | La distancia entre 2 nodos. <100M (buen entorno y cables) | ||
| estación de esclavos | Max 65535 (menos de 100 en uso práctico) | ||
| Sincronización estar nervioso | |||
| Mínimo comunicación ciclo | 500us | ||
| Señal de entrada | Entrada de control | Servo habilitado, reinicio de alarma, borrado de pulso de comando, pulso de comando prohibido, prohibido hacia adelante, prohibido hacia atrás, limitación de torque hacia adelante, límite de torque hacia atrás, selección de velocidad interna, posición interna triobúsqueda de origen/origen mecánico tAparejado, abrazadera de velocidad cero, sonda, etc. | |
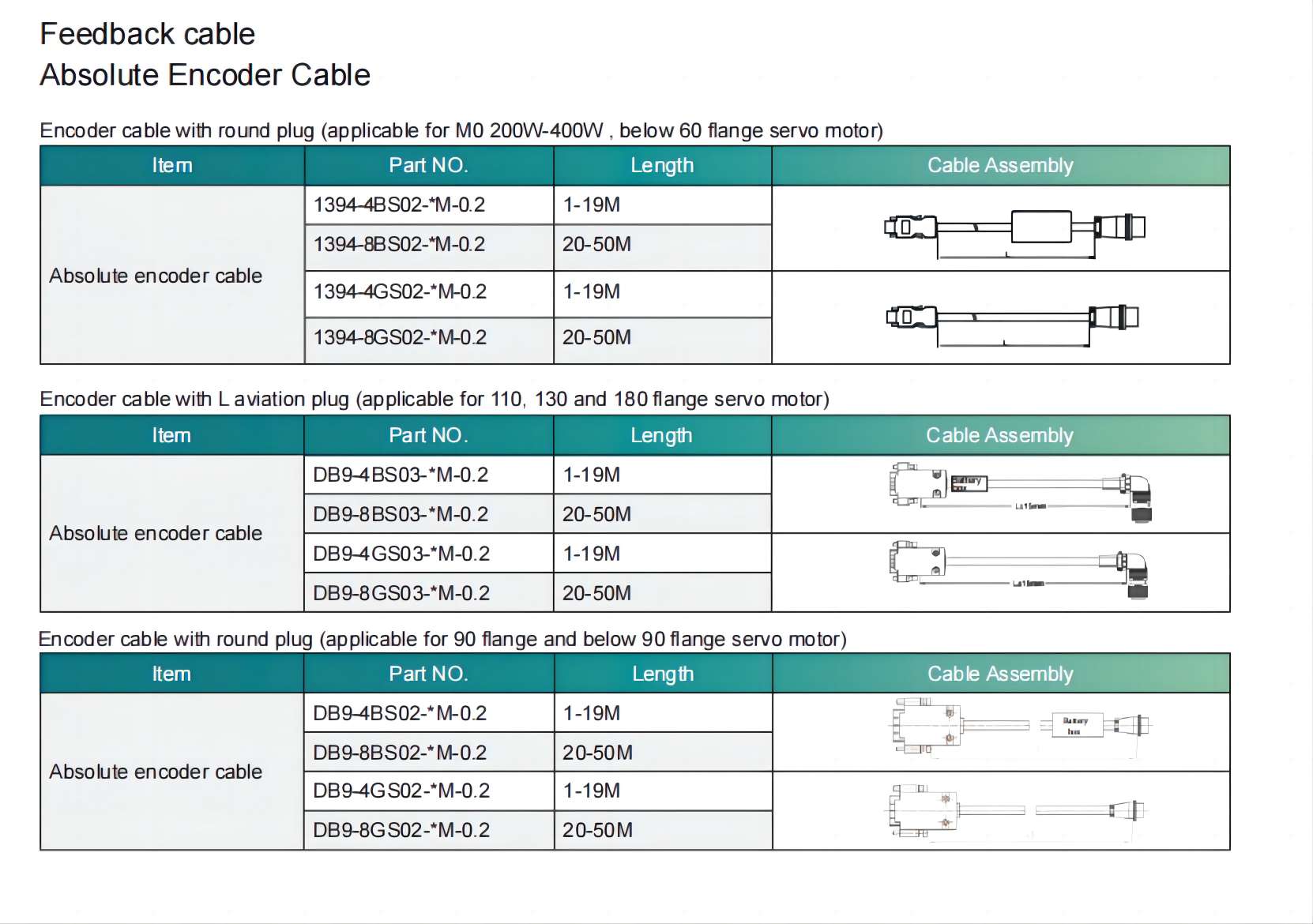
| Codificador | 1.Codificador de valor absoluto 2.Codificador incremental 3.Transformador rotativo | ||
| Producción señal | Salida de control | servo reaDy, alarma de servo, alcance de posicionamiento, alcance de velocidad, salida de freno electromagnético, detección de rotación, límite de velocidad, retorno completo, límite de par, etc. | |
| Señal del codificador frecuencia dividiendo la salida | 1. Salida de colector abierto de fases Z del codificador; 2.Fase -A,-B: salida diferencial de división de frecuencia (no aislada, cualquier relación de división de frecuencia) Fase-Z no es salida de división de frecuencia Función extendida de tiempo de pulso 3.Z. | ||
| Posición controlar | Modo de entrada | Conjunto de comunicación EtherCAT, registro interno: entrada de pulso de alta velocidad | |
| equipo electrónico relación | 1.0.01≤B/A≤100 2. Admite 2 grupos de equipos electrónicos, que se pueden seleccionar o cambio por parte de los usuarios | ||
| Aceleración/Desaceleración | El rango de configuración del tiempo de aceleración/desaceleración es de 1 a 30 000 ms. (de 0 acelerado a velocidad nominal) | ||
| Comunicación | 1.El puerto de comunicación RS485/RS232 está conectado con la PC, para configurar los parámetros de control y monitorear el servo. 2. Admite autobús EtherCAT | ||
| Parámetro configuración | Teclado | Utilice 4 teclas para configurar el parámetro, que se muestra mediante 5 LED. | |
| PC/PLC | El software PC/PLC se puede utilizar para configurar el parámetro del servo a través de Interfaz de comunicación RS485 | ||
| Función de supervisión | Corriente de salida, voltaje PN, velocidad del motor, pulso de retroalimentación del motor, revolución de retroalimentación del motor, pulso dado, error de pulso dado, velocidad dada, par dado, etc. | ||
| Función de protección | Sobretensión del circuito principal, subtensión, sobrecarga, sobrecorriente Error del codificador, exceso de velocidad, comando de control de pulso anormal parada de emergencia, sobrecalentamiento del servo, pérdida de fase de alimentación del circuito principal Error de freno de regeneración, posición, control de sobreposición, litio. alarma de batería, pérdida de sincronización, falla de inicialización de red, sincronización error de configuración del ciclo, error excesivo del ciclo de sincronización, etc. | ||
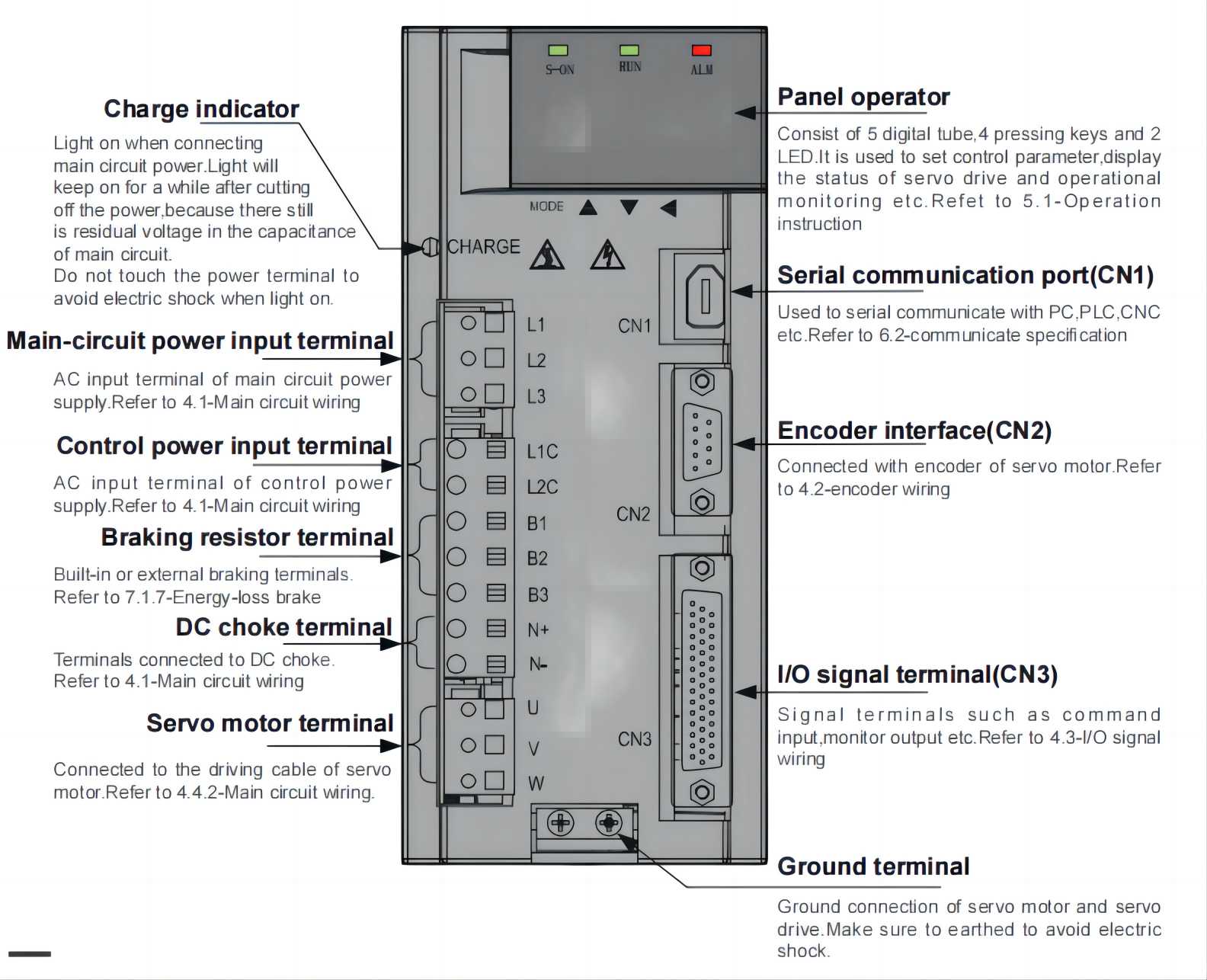
Componente de accionamiento
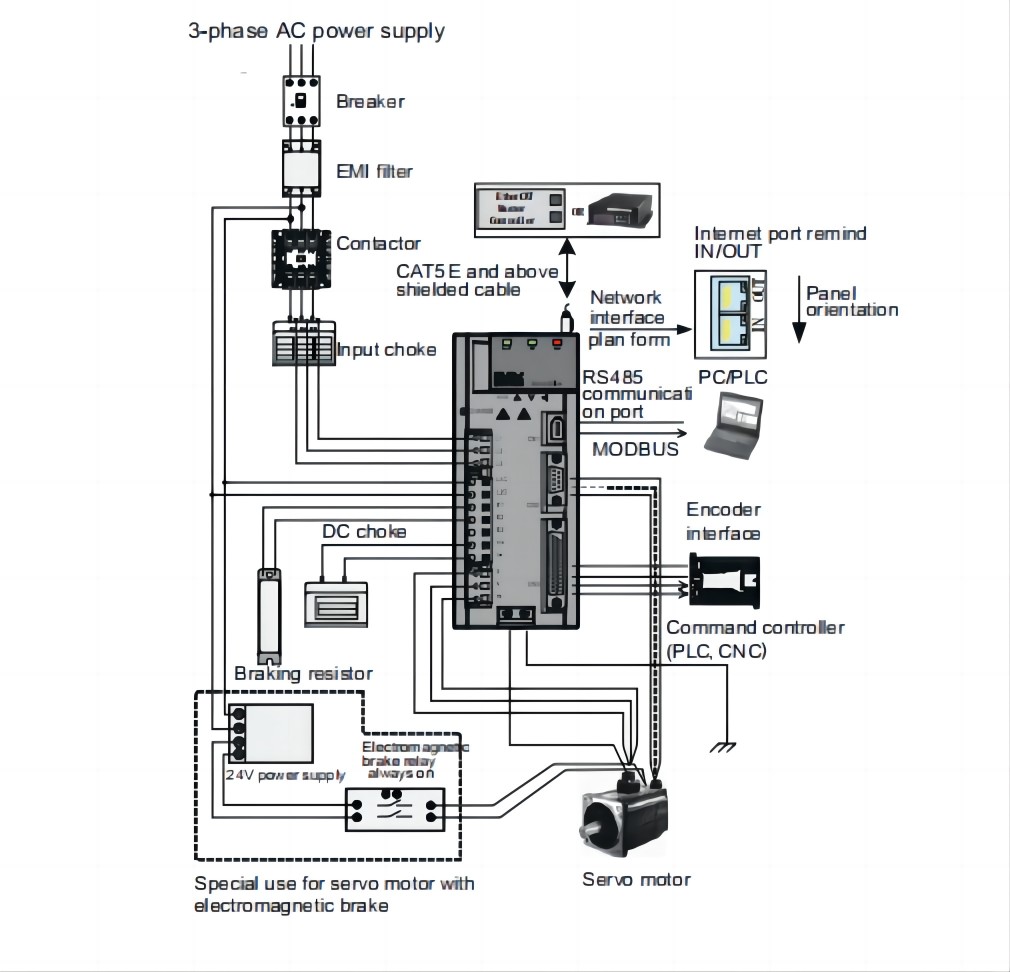
Conexión SCH-D20-E a dispositivos periféricos
Preguntas más frecuentes
¿Podemos aceptar muestras personalizadas?
No hay problema para el pedido de muestras y le invitamos a realizar pruebas antes de realizar su pedido grande.
¿OEM y ODM están disponibles?
Sí, aceptamos productos personalizados.
¿Puedo obtener un precio más bajo si pido grandes cantidades?
Sí, precios más baratos con pedidos de mayor tamaño, contáctenos y le daremos una cotización.
ETIQUETAS CALIENTES :




Teléfono : +86 -13459014809
Correo electrónico : sales@schwahrtechnology.com
No. 6788-1, Binhai West Avenue, Xike Town, Tong'an District, Xiamen City (Yincheng Zhigu)
Derechos de autor © 2024 tecnología co de schwahr. limitado.