♦ ejes de control: 4 ejes;
♦Interpolación de línea, interpolación de arco;
♦Trayectoria continua, la trayectoria sigue;
♦Todo tipo de aceleración y desaceleración;
♦Fácil operación y programación sencilla;
♦Controle y controle la máquina todo en uno, ahorre cables, espacios y costos;
Artículo No :
SCH-QC400AOrden (MOQ) :
5Pago :
T/TOrigen del producto :
ChinaControl de robot SCARA SCH-QC400A
•El software AR Studio ofrece escalabilidad, funcionalidad y expansión flexible de la biblioteca de procesos.
•Admite desarrollo secundario basado en el protocolo modbus para controlar el movimiento del robot y monitorear el estado del robot.
•Soporte para protocolo EtherCAT, eje adicional externo expandible
Especificaciones técnicas
| modelo | QC400A | Máquina integrada de accionamiento y control. | entorno de programación | lenguaje AR | ||
| Método de almacenamiento | Disco U, tarjeta SD | |||||
| Colgante didáctico | espectáculo | 8 pulgadas | estándar | O entrada | Ruta 34 | |
| Método de enseñanza | Entrada de datos manual (entrada de valor de coordenadas) Enseñanza de coordenadas cartesianas Enseñanza fuera de línea (Entrada de datos desde el exterior) | 1O | salida E/S | Ruta 27 | ||
| comunicaciones externas | RS-232 | 3 | ||||
| Ethernet | 1 | |||||
| Interfaz LVDS | 1 | |||||
| USB (2.0) | 2 | |||||
| Seguimiento de la entrada del lenguaje de programación | lenguaje AR | Especificaciones básicas | Dimensiones | 400 mm × 260 mm × 160 mm | ||
| cable de datos | 3M | peso | 10 kilos | |||
| tamaño y peso | 355 mm × 248 mm × 70 mm aproximadamente 2 kg | Cable de energía | 1,5 millones | |||
| fuente de alimentación | 24 VCC | usando electricidad | 220 VCA | |||
| Temperatura de funcionamiento | 0~40℃ | |||||
| Método de intercambio de datos | USB | Temperatura de funcionamiento | Por debajo del 90 % de humedad relativa (sin condensación) | |||
| Función de control de eje | 4 ejes | temperatura de almacenamiento | -10~65℃ | |||
| Máquina integrada de accionamiento y control. | Ciclo de control de posición | 8K/16K | ||||
| Funciones de control de movimiento/servo | Movimiento de arco, interpolación lineal, interpolación de arco, trayectoria continua, varios tipos de aceleración y desaceleración, etc. | |||||
| Sistema coordinado | Sistema de coordenadas conjuntas, sistema de coordenadas rectangular. | |||||
| Configuración de la unidad de ubicación | Grado, mm | |||||
| Deportes sin conexión | Método completo de control de posición absoluta (no es necesario volver al origen) | |||||
Configuración del producto
| modelo | QC400A | |
| Colgante didáctico | ADT-RPB06 (pantalla táctil a color de 8 pulgadas + botones) | |
| Tipos de motores soportados | (serie aXS) | Rango de potencia del motor 100W-1000W (sin freno), 100W-750W (con freno) |
| Tamagawa | Rango de potencia del motor 100W-1000W (sin freno), 100W-750W (con freno) | |
| matsushita | Rango de potencia del motor 100W-1000W (sin freno), 100W-750W (con freno) | |
| Tipos de codificadores compatibles | Tipo de valor absoluto de varias vueltas, tipo de valor absoluto de una sola vuelta | |
Pantalla del producto

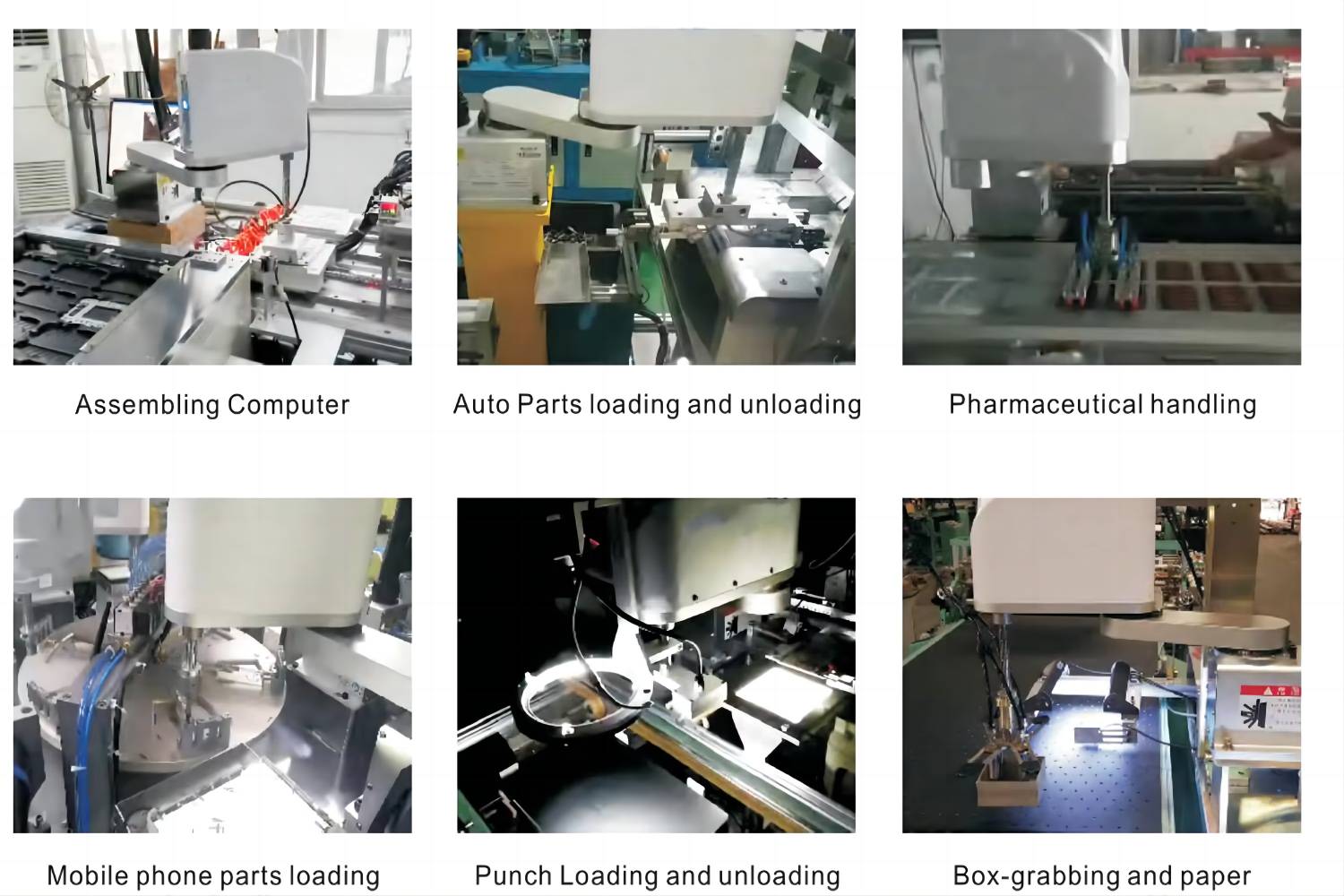
Solicitud
Preguntas más frecuentes
¿Podría darme los precios de sus productos?
Bienvenido. Por favor no dude en enviarnos un correo electrónico aquí. Recibirás nuestra respuesta en 24 horas.
¿Podemos imprimir nuestro logotipo/sitio web/nombre de la empresa en los productos?
Sí, indique el tamaño y el código Pantone del logotipo.
¿Cuál es el plazo de entrega para el pedido regular?
3 ~ 7 días para una cantidad de pedido inferior a 500 unidades. Para más cantidad, generalmente 15 días.
ETIQUETAS CALIENTES :




Teléfono : +86 -13459014809
Correo electrónico : sales@schwahrtechnology.com
No. 6788-1, Binhai West Avenue, Xike Town, Tong'an District, Xiamen City (Yincheng Zhigu)
Derechos de autor © 2024 tecnología co de schwahr. limitado.